一种电缆管道智能巡检仿生机器人的设计与实现
时间:2023-02-17 12:35:08 来源:千叶帆 本文已影响人
周启平
(安徽继远软件有限公司,安徽 合肥 230088)
近年来,密闭空间作业发生的人身伤害事故时有发生。某些电缆通道位于地面以下,其通道巡检属于密闭空间作业,对巡检人员的生命安全造成严重威胁[1]。目前,电缆井下巡视主要采用人工进入电缆通道巡视的方式。电缆通道不仅有一氧化碳、硫化氢、甲烷等有害气体的存在,而且由于地势、下雨等原因汇聚的积水、淤泥等,使得运检人员进行井下巡检作业的难度更大,且具备一定危险性[2]。另外,电缆通道巡检流程涉及打开井盖、通风、测量气体浓度、下梯作业及测温拍照等多个步骤,导致巡检过程用时较长,直接影响整个过程的作业效率。
对此,亟需研制一种能够随时在井内恶劣环境下自由移动且具备巡视成像、测温等多项功能的装置来替代传统人工巡检作业方式,提高电缆通道巡检和故障查找效率。利用人工智能、物联网等相关先进技术,本文提出一种适用于电缆管道智能巡检场景应用的仿生机器人设计方案。该方案能够有效提升智能巡检效率,并且降低巡检成本。
1.1 总体方案
本文提出的仿生机器人基于仿生学原理,以六足仿生蜘蛛为模型,通过分析其自身结构和相关运动机理进行设计。该机器人可满足各种复杂工况下的应用。仿生机器人的总体实现方案如图1所示。

图1 总体实现方案
该方案主要涉及以下几方面的工作:
(1)手机App向控制主板发送信息传输命令;
(2)编写BCM2835执行程序,对接收信号进行逻辑判断,控制六足机器人的移动;
(3)集成温度、气体检测、视频传输等装置,实现对电缆通道的巡视检测。
1.2 设备选型
电缆管道智能运检仿生机器人主要由机载系统(控制芯片、舵机)和检测系统(温度传感器、通道环境检测及气体传感器)两部分组成。不同设备的要求有所不同,具体如下。
(1)控制芯片,实现温度和气体监测,控制舵机操控巡检装置的运动方向,要求具有运行高可靠性。
(2)舵机,具有正反转功能,要能够容易控制启停,实现精准控制电机转动。
(3)温度传感器,实现温度检测,要求具有较高的可靠性。
(4)通道环境检测,实现近距离无线数据传输和存储,要求系统可靠性高。
(5)气体传感器,保证气体检测的前提下实现最大程度的省电,并要求传感器能分辨氧气、一氧化碳、甲烷、硫化氢等多种气体,具有高灵敏度[3]。
下面将对各选型设备的可选方案进行特性分析,比较分析得出满足条件的选型方案,具体如表1所示。

表1 设备选型
仿生机器人的设计实现过程包括搭建BCM2835最小系统模块、设计驱动行走模式、安装视频传输模块、安装气体检测模块、安装温度检测模块以及整体联调测试等步骤,流程如图2所示。

图2 仿生机器人设计实现流程
2.1 搭建最小系统模块
开展仿生机器人设计,首先要做的是搭建最小系统模块,并对该功能模块进行充分的测试验证,确保模块满足系统总体要求。该模块设计分为最小系统构成、芯片引脚配置、编写代码测试等步骤。
(1)搭建博通BCM2835芯片最小系统架构。该系统主要包括电源、通信、电机、I2C、舵机及扩展等相关接口,系统构成如图3所示。

图3 最小系统构成
(2)对芯片相关引脚进行配置。最小系统模块主要包括电源/接地、TXD/RXD,GPIO,SDA/SCL以及信号使能等引脚,相应引脚映射配置关系[4]如表2所示。

表2 引脚配置表
(3)编写代码及测试
编写运行控制程序,对每一个端口利用LED、万用表进行逻辑功能测试。
编写系统GPIO口高低电平输出程序,利用万用表测试各个GPIO口导通功能。核心代码如下。

2.2 搭建驱动行走模式
驱动行走模式的搭建按以下步骤进行。
(1)选取合理的驱动舵机。为满足性能要求,经计算,电机的最大输出扭矩要大于10.58 kg·cm。本方案选用LX-224HV舵机。该舵机采用直流铁芯碳刷马达,工作电压为11.1 V,扭矩为20 kg·cm。
(2)分配六足机器人的行走方式。对机器人的六足进行编号,1,4,5号腿为A组腿,2,3,6号腿为B组腿,步态过程如图4所示(实心圆代表支撑腿,空心圆代表摆动腿)。起初,六腿均处于支撑状态,B组腿抬起转换为摆动腿,A组腿作为支撑腿支撑机体向前移动,然后B组腿向前摆动后落地转换为支撑腿,A组腿抬起转换为摆动腿,B组腿支撑机体向前移动,A组腿落下,机器人回到初始姿态。

图4 六足机器人行走步态
(3)分配串口控制舵机移动方向。对串口进行初始化,设置舵机波特率为115 200 b·s-1,对18个舵机分别分配相应ID号,并与中央控制板相连接。利用上位机VNC软件对六足机器人的动作进行编辑,实现前进、后退、左转、右转、左侧移动、右侧移动等功能。动作编辑示意如图5所示。

图5 机器人动作编辑示意图
2.3 安装视频传输模块
视频传输模块采用型号为hv3808的USB摄像头,传感器类型为CMOS,像素为30万,最高分辨率为640×480,工作温度为-20~75 ℃,接口为USB2.0驱动,协议支持UAC1.0和UVC1.1/1.5。
将摄像头USB接口接入控制板并测试安装情况。如图6所示,打开Linux终端,在插入摄像头前后,分别输入命令lsusb,从中可以得到摄像头设备ID,表示摄像头已被成功识别。
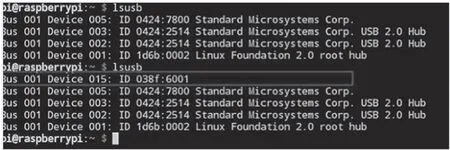
图6 视频模块接入测试图
2.4 安装温度检测模块
DS18B20模块用于温度检测,其具有体积小、硬件开销低、抗干扰能力强、精度高等特点。模块引脚定义:DQ为数字信号输入/输出端,GND为接地端,VCC为外接供电电源输入端。将该模块与BCM2835进行连接测试,步骤如下:
(1)挂载设备驱动,sudo modprobe w1-gpiosudo modprobe w1-therm;
(2)验证设备是否生效,cd /sys/bus/w1/devices;
(3)查看温度,cat 28-011939632f5b/w1_slave;
如图7所示,其中t=25 062代表温度检测结果,除以1 000换算为摄氏度,即实际温度值为25.062 ℃。

图7 温度测量结果示意图
2.5 安装气体检测模块
气体检测采用精讯畅通公司的工业气体检测专用模组MQ-2,模组检测灵敏度较高。该模组具有4个端口:DO为连接到开发板的数字引脚,GND为接地引脚,VCC为外接供电电源引脚,AO为连接到开发板的模拟引脚,引脚输出的电压值越高,通过ADC采集的模拟值越高[5]。验证发现,该模块具有良好的检测性能,误差控制在2%以内。
2.6 整体联调测试
图8给出了六足机器人实物图和App操控界面。通过手机App连接六足机器人内置的蓝牙模块,通过向其发送前进、后退、左转、右转等方向指令对机器人进行控制,实现拍照、温度、气体检测等功能。

图8 六足机器人实物及App操控界面
为测试功能的有效性,利用六足机器人对10 m段电缆井通道进行巡视,结果如表3所示。经测试验证,六足机器人可实时传输视频数据,准确执行指令,完成对温度和气体的检测。

表3 巡视结果数据
为充分验证六足机器人在电缆管道巡检的有效性,本文选取某供电公司的电缆线路进行了测试。应用机器人前后的巡检时间比较如表4所示。可以看出,相比于传统人工巡检方式,六足机器人在效率上有了极大的提升。并且,使用机器人替代人工进行电缆通道巡检,能够极大提升电缆通道巡检运维水平。

表4 应用前后巡检时间对比表
传统的电缆沟井内巡检方式存在劳动强度大、巡检效率较低的问题,且井下长期密闭、通风性差,人员井下作业具有一定危险性。本文利用仿生物学以及结构动力学原理确定运动结构,提出一种电缆管道智能巡检仿生机器人的设计方案,极大地提升了电缆管道运检的水平,具有良好的应用价值。
猜你喜欢 舵机电缆气体 核电厂电缆桥架超容问题的分析与处理中国核电(2022年3期)2022-09-17第二节发生在肺内的气体交换中学课程辅导·教学研究(2017年11期)2017-09-23小猫被困电缆井阿姨喂它一年多作文·初中版(2017年11期)2017-09-14从西安问题电缆看突发舆情处置的正确打开方式领导决策信息(2017年13期)2017-06-21海太克HS—1100WP数字舵机航空模型(2016年5期)2016-07-25超音速舵机保护器航空模型(2016年5期)2016-07-25菜鸟看模型航空模型(2015年6期)2015-10-21和大气层中的气体做游戏少儿科学周刊·少年版(2015年1期)2015-07-07和大气层中的气体做游戏少儿科学周刊·儿童版(2015年1期)2015-07-07舵机的应用中国信息技术教育(2014年5期)2014-03-17 相关热词搜索:机器人,管道,电缆,





