基于5G技术面向复杂环境重载移动机器人创新设计*
时间:2023-02-28 12:10:07 来源:千叶帆 本文已影响人
徐 斌,陈 友
(广东嘉腾机器人自动化有限公司,佛山 528313)
随着经济全球化的发展和港口自由贸易的发展,航空航天、高铁建设、港口、机场、核工业、船舶、大型涡轮机、港口集装箱运输业等行业已经进入了快速发展时期[1-6]。原有的拖挂车作业已经满足不了当前各行各业的需求,因此,重载移动机器人(Automated Guided Vehicle)应运而生,它是一种装有自动导引系统的搬运设备,与传统重载搬运设备相比,具有安全性高、定位精确、工作效率高等优点。
在此背景下,许多国家和高校认识到重载AGV的强大作用,国内外投入了大量的人力物力来进行研究和应用,中国高校的学者对国内外的重载运输车、牵引车进行了深入的研究,也研究出了电动、混合动力的驱动系统[7-15]。
但是,在面对如上所述质量较大的中大型工件以及港口集装箱重载搬运需求时,国内传统搬运机器人无法满足要求,而选用国外机器人则成本较高。
目前市场的20 t及以上重载移动机器人售价均超百万元,且大多数产品采用“单舵轮”设计,轮子磨损速度快、维护成本高;
在移动机器人向重型和超重型(承载能力100 t以上)发展时,国内尚无法提供高转矩、低底盘、全转向的驱动轮单元。
因此,研制可承受重载荷,运行迅速、稳定可靠的移动机器人迫在眉睫。
本文以载重80 t载荷的移动机器人为例,以差速结构设计方法设计20 t重载移动机器人舵轮,通过仿真计算对整机架构的轻量化设计、研发多智能体协同感知系统,实现对多种类型和多台智能体同时进行协同导航、协同定位、路径规划和任务处理。建立中国移动机器人行业5G通讯标准,处理重载移动机器人运行过程中的海量数据。开发语义SLAM算法,为重载移动机器人提供环境的结构信息和自身的位置信息。该重载移动机器人的创新研发,突破行业痛点、攻克“卡脖子”技术,有利于为国产机器人行业建立技术自信,助力打破全球工业机器人市场的垄断格局。
1.1 重载移动机器人整机设计
载重80 t移动机器人的总体尺寸:7 160 mm(长)×4 006 mm(宽)×1 060 mm(高);
实现的功能为整个过程中移动机器人的运动方式为前进、后退、横移、原地转圈。
移动机器人采用“4组差速轮”的布置形式,如图1~2所示。整个系统为差速轮配备一个车载控制器(VCU),通过VCU接收指令控制4组差速轮运动。VCU集成多差速轮控制协同算法,能够将PLC控制器发出的差速轮的移动速度v、转向角度θ指令进行求解运算,得到各个差速轮的位姿状态,控制差速轮及辅助轮按照设定速度和角度运行,并将数据返回于PLC控制器中。
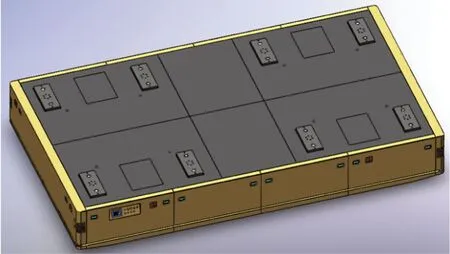
图1 80 t重载移动机器人整机外观
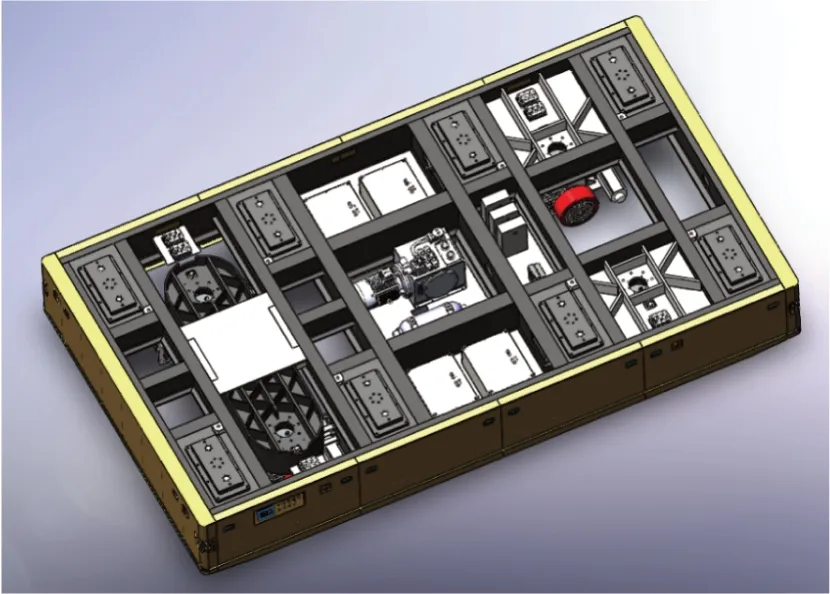
图2 80 t重载移动机器人整机布局
1.2 重载移动机器人舵轮设计
目前市场的20 t及以上重载移动机器人售价均超百万元,且大多数产品采用“舵轮”设计,轮子磨损速度快、维护成本高;
在移动机器人全向重型和超重型(承载能力80 t以上)发展时,国内尚无法提供高转矩、低底盘、全转向的驱动轮单元。
本文自主研发对称式20 t重载舵轮,实现了驱动单元的360°旋转,并以差速设计实现了驱动轮的高耐磨和长寿命。如图3所示。

图3 20 t重载舵轮
1.3 重载移动机器人整机轻量化结构设计及仿真
对载重量为80 t的重载移动机器人车架进行焊接工艺的仿真模拟、有限元分析、尺寸优化以及拓扑优化。首先,利用Simufact.welding焊接仿真软件对车架纵梁进行不同焊接顺序的仿真模拟,如图4所示,通过对比仿真模拟结果可以发现,焊接顺序对焊接温度场、焊接变形、残余应力有一定的影响;
然后利用Hypermesh有限元分析软件对车架进行有限元分析,如图5~6所示。其中包括有限元的建模过程:几何清理、中面抽取、网格划分及单元质量检查、材料属性以及连接工艺的添加,并根据车架实际受力情况,对其进行载荷边界条件的确定以及工况的选取,接着对车架进行了有限元分析,根据分析结果可知,该车架满足强度及刚度要求并具有轻量化空间;
同时,该车架可以有效地避免共振。
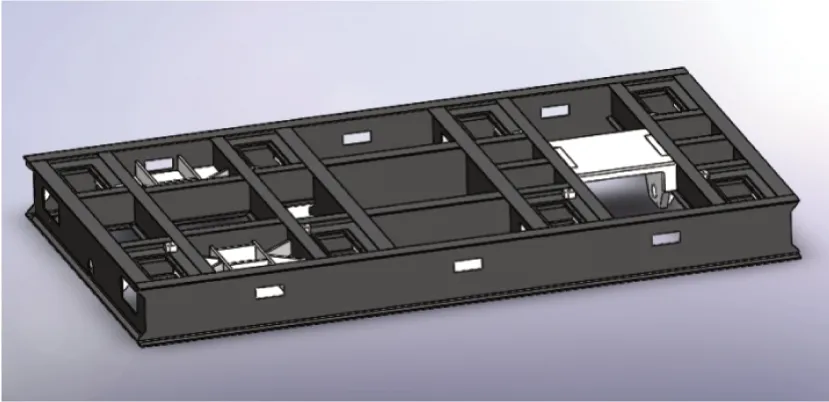
图4 80 t重载移动机器人整机车架
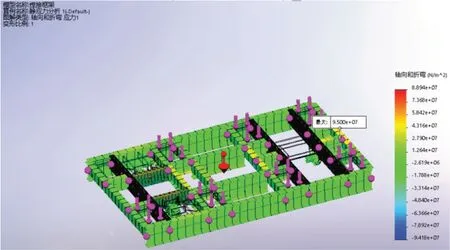
图5 80 t重载移动机器人整机车架强度分析

图6 80 t重载移动机器人整机车架刚度分析
整车有4个差速驱动单元,每个驱动单元2个电机,共计8个电机,分别用8个CAN控制接口的电机驱动器驱动。每个驱动单元,安装有CAN通信口的角度编码器,用于检测驱动单元的转向角度,共计4个角度编码器。在重载移动机器人车身的前、后、左、右安装有CAN通信接口的寻迹传感器。
重载移动机器人主控器器,根据AGV要做的行走动作,计算出各个驱动器的目标转角,以及驱动器的行走速度,从而计算出各个电机的运转速度以及电机的运转方向,通过CAN总线,发送相应指令给驱动器。重载移动机器人主控器,还会根据各个驱动器的角度编码器反馈过来的数据,计算驱动的角度,如果跟“目标转角”有偏差,就会调整相应驱动单元上的左、右驱动器的速度,通过差速调整驱动单元的角度,如图7所示。

图7 重载移动机器人控制框图
各个驱动单元的电机速度,都需要精确计算的,特别是重载移动机器人在转向的时候(在用手操器操作转向,或者重载移动机器人在进行磁寻迹引导,需要转向的时候),各个驱动单元的转角是不同的,每个电机的行走速度也是不同的,需要精确计算。
由于是让差速驱动单元,实现“舵轮的功能”,即不但能够提供行走动力,还需要控制其转向角度。
驱动单元的角度,是靠“驱动单元上左、右电机的速度差”实现转向的,安装有角度编码器,用于检测角度。重载移动机器人控制器,会根据重载移动机器人行驶的动作要求,计算出,各个驱动单元的“目标转角”的。而重载移动机器人可能在行驶的过程中,驱动单元是可能会由于各种原因,转向角度会出现偏差的,这个时候就需要主控器调整驱动器左、右电机的速度,让驱动单元重新回到“目标转角”。也就是说,重载移动机器人主控器需要实现“驱动单元的角度闭环”,为了描述方便,称之为驱动单元的转角跟随功能。
驱动转角的约定:驱动单元中轴跟车身中轴方向平行,此时驱动转角为0°;
右侧,驱动转角为0°~-135°;
左侧,驱动的转角为0°~135°。顺时针的时候,驱动的转角值变小。
驱动单元的转角跟随,分为“静态跟随”以及“动态跟随”。当重载移动机器人整车还处于行驶状态,驱动单元的当前转角偏离目标转角的时候,是采用“动态跟随”,即驱动单元的左右电机相对车身的运转方向一致(即跟车身运动的方向力一致),通过左、右电机的速度差,实现驱动单元的转角改变;
当重载移动机器人整车是处于停止状态时,由于驱动单元的目标转角改变,而需要跟随的时候,会采用“静态跟随”,即驱动单元的左、右电机相对车身的运转方向相反,从而让驱动单元以“原地旋转”的方式,改变驱动单元的转角。为了描述方便,约定重载移动机器人向HMI屏幕运行发得方向为正方向,反之为反方向。当电机运转的方向,跟重载移动机器人正方向一致,那么此时电机正转;
反之,电机反转。
3.1 多个重载移动机器人协同感知系统设计
多个重载移动机器人协同控制系统是一个能实现对多种类型和多台重载移动机器人同时进行协同导航、协同定位、路径规划和任务处理的控制系统,它是控制机器人执行任务的核心控制软件。多重载移动机器人协同控制系统可以通过接收客户系统、呼叫盒、呼叫客户端和点料系统等命令源发来的移动机器人任务指令,经过任务分解、任务分配、移动机器人位置信息共享、协同定位等环节,最终通过控制移动机器人执行一连串连续的操作以完成相应的任务。为了保障安全,目前移动机器人运行在提前设置好的路网上,如图8所示,白色小框表示一台重载移动机器人,黄色小方块表示任务站点,红色线条是表示重载移动机器人运行的路径。每个重载移动机器人实时通过5G网络与云端系统以及其他重载移动机器人进行信息共享。目前该系统可实现50台重载移动机器人协同完成任务,同时实现了多台重载移动机器人和多台叉车混合协同工作。
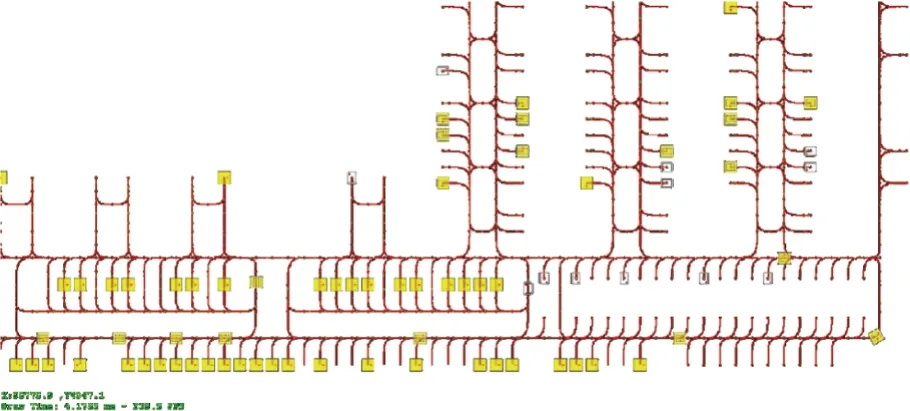
图8 多智能体运行路网
3.2 重载移动机器人语义SLAM算法
定位导航系统是重载移动机器人系统的重要组成部分,即时定位与地图构建(Simultaneous Localization and Mapping,SLAM)技术可以为重载移动机器人提供环境的结构信息和自身的位置信息。自身的位置信息通过局部环境信息与全局地图的比对而获得,SLAM技术从几何层面帮助机器人感知环境,SLAM算法解决重载移动机器人定位导航的问题。语义SLAM技术使得机器人不仅获得环境的结构信息,同时可以识别环境中独立的个体,获取个体的位姿、物理属性、功能属性等语义信息,即在地图中识别出相应的物体,并打标签,用于定位匹配。
重载移动机器人系统中的语义SLAM部分,目前的方案是由3D点云地图构建和目标分割组成。3D点云地图构建的数据只要来源于多线激光雷达和惯性测量单元(Inertial Measurement Unit,IMU),多线激光雷达提供大量的环境点云信息,IMU提供线加速和角速度。提取多线激光雷达的里程计因子、GPS因子、IMU的预计分因子和回环因子,采用因子图优化的方法得到机器人的全局一致的位姿,从而构建整个地图。重载移动机器人所运行的工厂3D点云地图如图9所示。
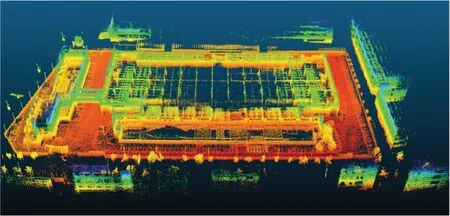
图9 工厂3D点云地图
重载移动机器人根据VLSAM远程计算和调度协同的需求,本文采用最新的5G技术来支撑。
(1)高速率要求
由于VLSAM传感器获取的视频信息要传输到云计算中心,进行多角度视频和多车视频的融合处理,因此每台AGV应具备较高带宽的传输能力。以每个摄像头提供1 080 p/30 fps的h265编码方案,需要4 Mb/s的带宽。目前5G理论传输速率在1 Gb/s,当前我们所采用的嘉腾5G智能网关可以提供最高500 Mb/s的下行速率和200 Mb/s的上行速率,单AGV理论上可以支持多达50个摄像头进行视频数据采集和上传。
(2)低延迟要求
由于AGV运动过程中需要实时根据VSLAM的定位信息和障碍物状态进行运动控制,故延迟要求较高。5G理论延迟在1 ms内,但目前商用环境5G公网只能提供大约40 ms的延迟水平,专网环境可以提供10 ms以内的保障。
(3)超高移动性要求
5G是移动通讯技术,理论上在时速500 km的场景下都可以运行。但由于要保证较大的带宽和低时延,在目前的商用环境中,测试过实际在100 km/h下,还能保持200 M的上下行速率和40 ms延迟。基本可以满足重载AGV的运行需要。
(4)海量接入要求
5G技术的理论接入能力是100万个/km2,虽然重载移动机器人在单位面积内不可能有这么大量的接入,但考虑到同一区域内可能存在较多的其他无线设备接入,还是在一定程度上对大接入有要求。
嘉腾机器人公司针对重载移动机器人的5G通讯技术,在北京大学的牵头下,首次在中国AGV行业建立5G通讯标准,如图10所示。

图10 中国AGV行业5G通讯标准证明
为了实验20 t差速舵轮的承载能力和运行可靠性,搭建了一个实验平台。实验平台为三点支撑结构,20 t差速舵轮在前面的中间位置,后面采用两个固定轮辅助支撑。
在实验平台上放置总质量为30 t的负载钢板和金属块,如图11~12所示。实验平台的负载运行速度为36 m/min,两种路况进行实验,水泥平地和10°的斜坡,时间周期为7天。

图11 负载30 t的实验平台

图12 在坡道行驶的30 t实验平台
对称式舵轮重载移动机器人舵轮试机结果:(1)重载移动机器人单组舵轮承载能力20 t,运行速度0.6 m/s,定位精度小于或等于20 mm;
(2)重载移动机器人采用4组轮组,可以满足承载80 t的目标要求。
实验结果表明产品突破行业痛点、攻克“卡脖子”技术,国产机器人更加贴近国内市场,具备开发成本低、响应速度快等先天优势,在性能功能上实现差异化,激发增量市场,将成为国产品牌差异化竞争的关键。
以载重80 t的重载移动机器人作为研究对象,通过对整机结构、舵轮、控制、导航等创新设计,得出如下结论。
(1)通过差速结构的设计方法,设计了20 t重载舵轮,结果显示:该方法减少两轮在转向时对地面的磨损,延长其使用寿命。搭建30 t重载实验平台,实验结果显示,20 t重载舵轮达到了载荷要求,而且定位精度小于20 mm。产品突破行业痛点、攻克“卡脖子”技术,有利于为国产机器人行业建立技术自信,助力打破全球工业机器人市场的垄断格局。
(2)整机采用4组差速轮的形式布置,实现重载移动机器人的运动方式为前进、后退、横移、原地转圈。通过建立机架的三维模型,并对该模型进行有限元等软件进行分析,仿真结果显示整机机架焊接顺序对焊接温度场、焊接变形、残余应力有一定的影响。
(3)首次在AGV行业建立中国AGV行业5G通讯标准,实现重载移动机器人低延时,以及海量数据的处理。
(4)语义SLAM对重载移动机器人室外运行提供保障。
基于5G技术面向复杂环境的重载移动机器人,推进了我国独立知识产权的智慧重载、高效、节能搬运机器人装备产业化,推动我国智慧重载移动机器人发展和应用。
猜你喜欢 移动机器人转角驱动 移动机器人自主动态避障方法北京航空航天大学学报(2022年6期)2022-07-02基于模糊PI控制的驱动防滑仿真系统分析汽车实用技术(2022年7期)2022-04-20玩转角的平分线中学生数理化·七年级数学人教版(2021年9期)2021-11-20屈宏斌:未来五年,双轮驱动,砥砺前行房地产导刊(2020年11期)2020-12-28侧围外板转角深拉伸起皱缺陷研究模具制造(2019年10期)2020-01-06轨旁ATC系统门控柜接收/驱动板改造铁道通信信号(2019年4期)2019-10-10在808DA上使用WIFI进行驱动数据同步制造技术与机床(2019年7期)2019-07-22基于Twincat的移动机器人制孔系统制造技术与机床(2017年3期)2017-06-23INS/GPS组合系统初始滚转角空中粗对准方法探测与控制学报(2015年4期)2015-12-15飞机活动面转角测量的方法探讨民用飞机设计与研究(2015年3期)2015-12-07 相关热词搜索:重载,机器人,面向,





