基于蒙特卡洛树搜索的视频异常场景监测方法
时间:2023-03-04 08:15:04 来源:千叶帆 本文已影响人
付 燕,李珍珍,叶 鸥
(西安科技大学 计算机科学与技术学院,陕西 西安 710054)
为保证公共秩序的安全,平安城市的建设在我国如火如荼地开展,安防领域备受关注,各类安防建设的规划以及工具技术均以极快的速度发展。其中,监控视频作为安防工程的“眼睛”,就是安防建设中极其重要的一个领域。截至2020年,我国在公共场所的监控摄像头数量已经超过1.35亿台,各式各类的监控摄像头密布在城市的各个角落,并实时生成海量的监控视频文件。大量的监控视频在保证城镇居民安全的同时,也存在一些问题,即需要处理大量的视频数据。如果使用人工的方式,不仅成本巨大,还极容易出现错漏,因此需要结合计算机科学,设计一种监控视频的异常场景监测算法。在现有的相关研究中,文献[1]使用自动编码器作为视频图像帧幅重建的工具,结合不同场景下的重建误差,提出一种基于深度自动编码高斯混合模型的视频监测方法,在能量概率密度的基础上,对低维密度估计进行优化。
文献[2]在自编码器的基础上,使用记忆力重建的方法来增强检索效率,同时为保证测试阶段的记忆项能够完好无损,给定输入值,选择合适的重建样本,并加强异常场景的重构精度。
文献[3]使用夜视功能的高清摄像头进行视频监控的异常场景监测工作,该方法中可以使用灰度化的方法对直方图进行预处理,同时建立视觉字典,提取目标细节,以深度学习的方法智能定位视频内的异常场景,并将其提取出来。
本文结合蒙特卡洛树搜索算法,设计了一种视频异常场景的监测方法。该方法能够通过目标提取得到视频内的异常目标。目标识别精度的测试结果表明,所提方法在简单场景与复杂场景内的AUC值分别为0.952和0.886,说明其监测精度较高,在简单场景与复杂场景下均可正常使用。
在视频监控中,最先显示出具备异常的就是行人的轨迹特征,因此需要对其进行轨迹特征的提取,并对行人进行目标跟踪。首先需要对目标区域进行提取与检测,划定视频监控内出现的行人目标,并将其保留在人体区域框内[4-5]。当同一个视频图像内出现多个行人目标时,需要重点注意,将其划定为一级异常场景,并进入目标跟踪模块。一级异常场景内通常有多个行人,这为公共秩序的异常提供了物质基础。在行人目标的跟踪模块内,使用目标运动信息匹配方法来标记1号目标和2号目标之间的预测位置与实际位置,其空间距离的计算公式为:

式中:Dm(i,j)表示第i个目标与j个目标之间的马氏空间距离;
Ei表示目标实际位置与预测位置的协方差矩阵;
Dj表示第j个目标的实际位置;
Di为第i个目标的实际位置;
ki和kj则分别表示第i个追踪器与第j个追踪器的预测目标[6-7]。当0≤Dm(i,j)<1时,证明该跟踪模块正常运行,视频中没有出现异常情况,可以将一级异常划归到正常的范围之内;
但是当Dm(i,j)≥1时,证明该视频的目标运动不符合预测轨迹,其具备极大可能性发生异常情况,继续将其划归到二级异常场景内。当目标跟踪显示结果为异常时,需要继续对其轨迹特征进行识别。行人的异常轨迹一般包括跨越行人警戒线以及复数目标在区域内徘徊两种分类,其中跨越警戒线的辨别方法可以使用二者之间的相对位置进行判定,公式为:

式中:Sp和Se分别表示第1个目标点附近的位置交点;
Sd和Sx分别表示第2个目标在端点两侧的相对位置关系。当二者相乘之后小于0,表示该视频内的行人目标没有发生异常[8]。正常的行人轨迹几乎是一条直线,而行为异常的行人轨迹则很难辨别,大致轨迹如图1所示。
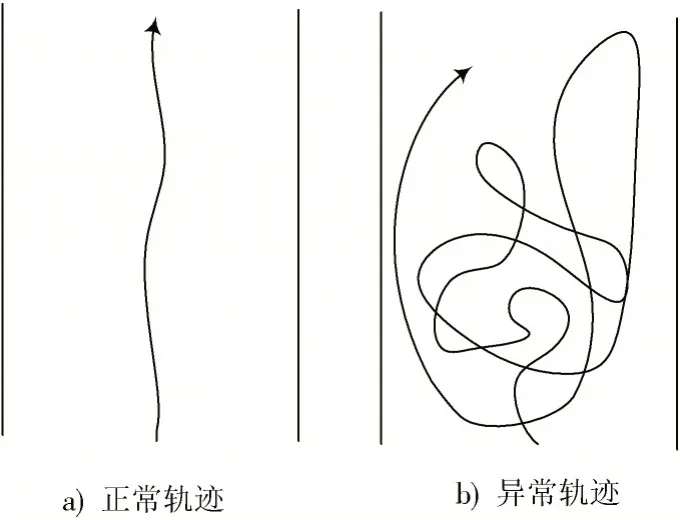
图1 正常与异常场景行人轨迹
首先计算视频内行人的标准速度,同时计算行人目标行走过这一段路程所需时间;
然后具体计算行人行走路程:

式中:XAB表示从进入视频图像后的起点到终点,目标行人行走的距离;
x(m)和y(m)分别表示运动轨迹点的位移之和;
x(n)和y(n)分别表示二者在x轴与y轴上的轨迹点停留阈值[9-10]。当XAB远远大于监控视频内距离时,表示该行人在视频内为异常。通过以上两个方法可以得到三级异常场景。当异常场景升级到三级之后,就可以初步判定该视频图像为异常图像,并对其做出重点标记,但是图像内的行人是否正在进行非法行动,则需要通过蒙特卡洛树进行分析。
蒙特卡洛树搜索算法是一种将蒙特卡洛方法作为同性搜索模型的决策方法,该方法可以模拟一个搜索树,直至获得最佳的检索条件才会终止迭代[11-12]。为获得准确的行人行为判别结果,需要建立输入层、卷积层以及输出层的全连接通道,如图2所示。
如图2所示的不确定判别网络中,从输入初始值开始,需要经过5个阶段的处理,才能够得到最终的判别结果[13]。首先需要输入残差块作为数据,其残差函数可以表示为:

图2 不确定判别网络

式中:D(x)表示残差函数;
P(x)表示函数的映射;
x为输入值。将该数据进行归一化处理,得到其激活函数:

式中J(x)表示激活函数。该函数的近似线性具备可导性,可以将其中一个实数准确地映射到[0,1]的区间内,并具备更快的网络训练速度[14]。其输出值的函数为:

式中S(x)表示输出函数值。结合该输出值,可以获得行人行为判别结果。
结合蒙特卡洛树搜索算法可以得到针对视频内部异常场景的识别与判定,如果获得了行人行为异常的判别结果,就可以直接将其圈出,并将该视频图像作为异常场景。在实际的视频监测算法中,可以计算矩阵图像的向量并将这些向量连接在一起,形成一个协方差矩阵:

式中:DT表示协方差矩阵;
pi表示样本集内均值向量的集合;
km表示样本集对应的特征值;
Nm表示样本集的样本数量;
di表示可靠性投影的映射矩阵[15]。结合上述公式可以得到一个综合性的视频场景监测算法,使用协方差矩阵将所有的判别结果连接在一起,就可以构成整体的视频异常检测结果,并在最终形成相应的算法。
4.1 实验数据集
为测试所设计的蒙特卡洛树搜索方法在视频异常场景监测中的有效性,进行如下实验。实验中首先需要建立数据集,收录约1 000个路面监控的短视频,其中包含500个具备暴力行为的监控画面,剩余的500个视频监控则是无异常行为的监控画面。通过算法对这些监控视频进行监测,同时识别其中具备暴力行为的监控画面,测试其监测精度。每个短视频的长度为50~60帧,每一幅影像的分辨率均为360×288。视频的类型多种多样,其中既包括人群数量极大、场景内人流较为拥挤的影像,也包括只有暴力实行双方的视频影像,既包含室内场景,也包含室外场景。
4.2 网络参数训练
对于视频图像,需要首先提取其动态以及静态特征,因此在训练网络参数时,需要将动态特征与静态特征分开训练。首先进行相同的标准化处理,计算公式为:

式中:Hm表示被标准化处理后的视频影像数据;
Hi表示第i个原始的视频数据;
μd表示原始视频特征的均值;
pi表示数据方差。在获得标准化处理的视频数据后,计算网络参数训练过程中的损失函数,公式为:

式中:fm表示标准化处理后视频数据特征的噪声点系数;
Cf表示惩罚函数;
pk表示松弛变量。通过该函数可以得到不同迭代次数下模型训练损失函数值,损失函数变化曲线如图3所示。

图3 损失函数变化趋势
在图3所示的损失函数变化趋势效果图中,随着训练次数的增加,模型训练的损失值在不断减小。当训练次数达到100时,模型训练损失值达到最小值,约为0.76,此时的模型训练损失值即为损失值的最小值,此时的训练次数则为最佳的训练次数。因此,在本文实验中,选择网络参数的训练次数为100。
4.3 目标提取
使用上文中的方法分别对数据集内的影像进行目标提取与识别。为测试该方法的有效性,选择一个简单环境(只有两个人)和一个复杂环境分别对暴力行为的监控画面进行目标提取,得到的监控画面结果如图4所示。
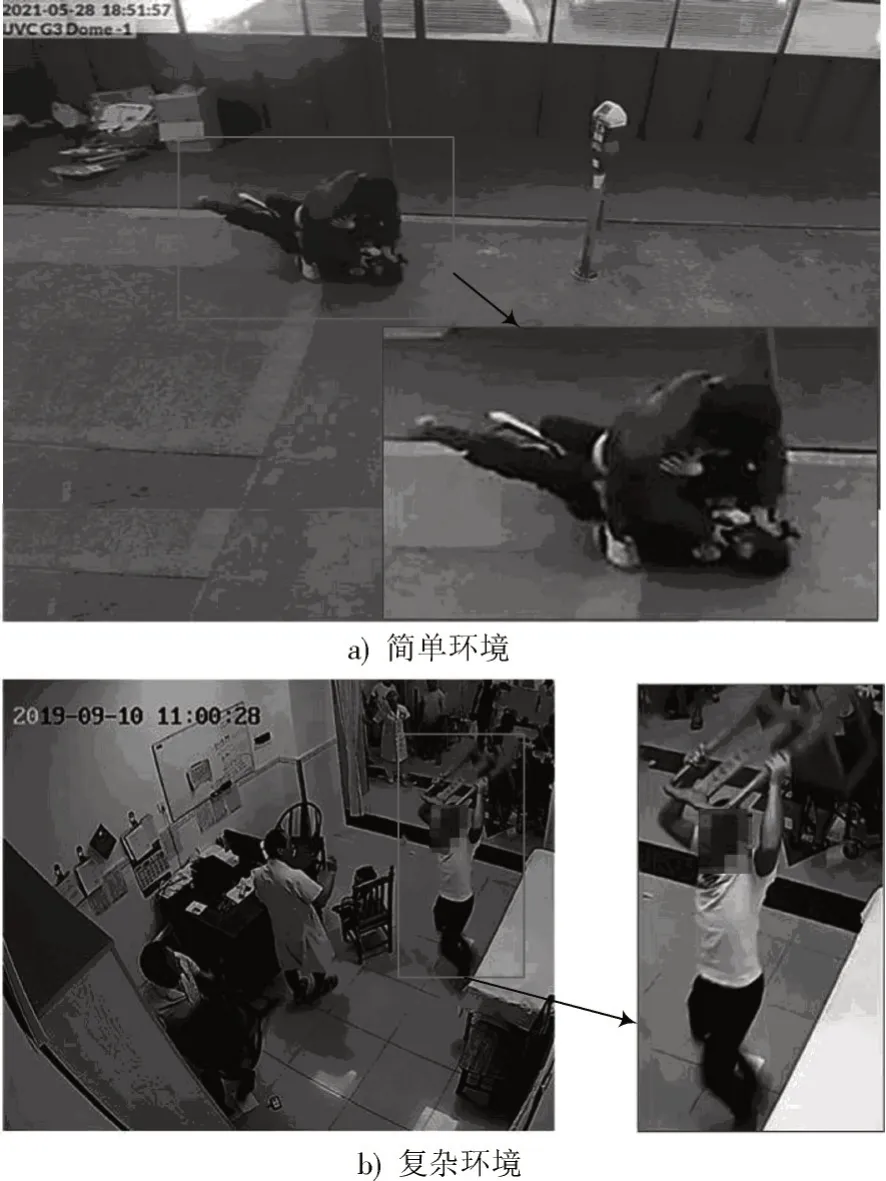
图4 暴力行为监控画面
在图4a)简单环境中,暴力行为的监控画面只有两个人,因此该目标识别方法可以很轻易地得到进行暴力行为的目标任务,并使用方框将其圈出。在图4b)复杂环境中,可能存在暴力行为的监控画面中有多个人,该方法也可以将存在暴力行为的人进行标记,并使用方框圈出。
4.4 目标识别精度
本文使用ROC曲线评估几种视频异常场景监测的方法的识别效果,其中将Tfp(r假正类)作为ROC曲线的横坐标,将Ttp(r真正类)作为ROC曲线的纵坐标,这两种指标的计算公式为:

式中:Ttp表示真正的异常行为;
Tfn表示识别错误的正常行为;
Tfp表示识别错误的异常行为;
Ttn表示识别正确的正常行为。在一定的阈值下,分别计算Tfpr指标和Ttpr指标,绘制ROC曲线,该曲线越接近上方,则该曲线的面积就越大,则该视频异常场景的监测结果就越准确。
目标识别精度测试结果如图5所示。

图5 目标识别精度测试
在简单环境下,本文蒙特卡洛树搜索算法的AUC值约为0.952,深度自编码-高斯混合模型的AUC值为0.863,记忆力增强自编码与智能定位技术的AUC值分别为0.832和0.811,对比以上4个结果可知,本文方法的目标识别精度最高。在复杂环境下,本文算法的AUC值约为0.886,另外三种算法的AUC值分别为0.789,0.796,0.774,综合对比这4种算法在复杂环境下的识别精度可知,本文方法的AUC值大于任意一种对比方法,其识别精度最高。综上所述,本文基于蒙特卡洛树搜索方法的视频异常场景监测方法识别精度高于其他三种方法。
本文设计一种基于蒙特卡洛树搜索算法的视频异常监测方法,该方法可以依据蒙特卡洛树的不确定判别,判断视频内行人行为是否存在异常,并得到相应的监测算法。为验证该监测方法的有效性与优越性,分别对简单场景以及复杂场景内的视频进行测试。结果表明,在实际的目标提取中,所提方法可以在简单场景和复杂场景内均得到提取结果,同时其目标识别精度均大于其他三种监测方法。
猜你喜欢 蒙特卡洛行人轨迹 毒舌出没,行人避让意林(2021年5期)2021-04-18轨迹读友·少年文学(清雅版)(2020年4期)2020-08-24轨迹读友·少年文学(清雅版)(2020年3期)2020-07-24征服蒙特卡洛赛道小哥白尼(趣味科学)(2020年6期)2020-05-22路不为寻找者而设扬子江(2019年1期)2019-03-08基于蒙特卡洛法的车用蓄电池20h率实际容量测量不确定度评定北京汽车(2018年5期)2018-11-06轨迹现代装饰(2018年5期)2018-05-26进化的轨迹(一)——进化,无尽的适应中国三峡(2017年2期)2017-06-09我是行人小天使·一年级语数英综合(2017年6期)2017-06-07曝光闯红灯行人值得借鉴汽车与安全(2016年5期)2016-12-01 相关热词搜索:蒙特,监测,卡洛,





