基于恒力控制方法的医美机器人系统研究
时间:2023-03-10 10:55:05 来源:千叶帆 本文已影响人
刘凤义 岳承涛
(上海机器人产业技术研究院,上海,200063)
随着生活水平的不断提高,人们对年轻、美丽等外在美的追求从未停止,医疗美容、科技美容等产业在国内得到了蓬勃发展。据新闻报道,2021年中国医美市场规模达到2179亿元,增长率达12.4%,预计2025年中国医美市场规模有望达到4108亿元。作为备受女性追捧的抗衰老医美项目,热玛吉(Thermage)可以实现皮肤拉伸紧致的效果。其原理是:当射频电流作用于人体时,由于皮肤及皮下组织对电磁波存在阻抗性,组织细胞内的水分子会发生震动、旋转摩擦产生热能,热能作用于靶组织可破坏细胞,从而使组织收缩。与其他治疗方法相比,热玛吉具有安全性高、副作用极小、患者耐受性好、恢复快等优点。热玛吉先后获得美国FDA、欧盟CE认证,风靡欧美、日韩等80多个国家,并在全球范围内成功实现50多万例临床案例[1-3]。
热玛吉要求专业医师亲自操作,对医师技术水平要求较高,在实际治疗过程中需要长时间、高精度、重复执行打点工作,容易造成身体疲劳,导致方格打点定位精度及力度出现偏差等问题。笔者团队研发了一款用于热玛吉治疗的医美机器人,希望能解决以上痛点问题,同时相信智慧医美及其相关技术将会为医美行业带来革命性的变革。
1.1 设计原则
1)安全性。
由于医美机器人是直接在客户面部上进行打点操作,因此安全性是医美机器人设计中要解决的首要问题。医美机器人需要具有完备的安全机制,当发生异常时,机器人系统可以做到自动避险,避免对客户造成伤害,保证打点作业的安全性和稳定性。
2)标准化。
为了便于申请医疗器械认证,医美机器人的所有设计均需符合中国医疗器械申请规范及相关国家标准要求,具体包括:
(a)电气元器件选型需符合国家3C认证;
(b)机器人设计符合《GB/T19974-2018医疗保健产品灭菌因子的特性及医疗器械灭菌过程的开发、确认和常规控制的通用要求》《GB/T20145-2006灯和灯系统的光生物安全性》《GB/T37283-2019服务机器人电磁兼容通用标准抗扰度要求和限值》《GB/T37284-2019服务机器人电磁兼容通用标准发射要求和限值》《GB9706.1-2020医用电气设备第1部分:基本安全和基本性能的通用要求》等国家标准。
1.2 系统架构
医美机器人系统由支架、机械臂(含夹具)、3D深度相机、屏幕监控相机、触控操作一体机系统、姿态变动监控单元、面部温度监控单元等部分组成。医美机器人系统架构如图1所示。

图1 医美机器人系统架构
1.3 硬件设计
1.3.1 支架
支架主要用于机械臂、控制柜和视觉组件的固定及定位,应满足以下要求:
1)方便整体移动,支架脚轮要带刹车,方便固定;
2)具备一定的刚性,保证机械臂与视觉组件之间的相对位置固定,可抵消机械臂运动产生的惯性负载;
3)整体外形尺寸总高度不大于1900mm,总宽度不大于750mm,总长度不大于800mm;
4)治疗床两侧均需配备手持按钮,客户有不适或异常情况时可按下按钮实现紧急停止。
1.3.2 机械臂
机械臂用于带动治疗枪头完成打点作业,不得装置在客户面部正上方。治疗枪头前端需具备约10mm轴向弹性浮动行程。
1)机械臂负载能力不小于2kg(含夹具、治疗枪、打点预压力);
2)治疗枪端面运动区域不小于250mm×250mm×300mm(长×宽×高),机械臂返回原点时需保证治疗枪头距离客户头部位置至少有80mm间距,方便客户起身;
3)机械臂端部枪头重复夹持定位精度不大于±0.25mm,夹具拆装时间不大于15秒/次,枪头点位变更不得采用滑移的方式。
1.3.3 3D深度相机
基于3D深度相机具备的三维建模及异形曲面定位技术,整个系统可实现对客户面部轮廓扫描建模、网格点位识别及定位引导等功能。
1)面部扫描建模时间不大于5s(含变位和扫描),单块打点区域扫描建模时间不大于3s;
2)3D深度相机需具备网格中心寻点、中心点垂直轴向方位角识别、网格交叉点寻位、网格交叉点垂直轴向方位角识别、网格纵横经纬线方向识别等功能;
3)客户面部额头区域识别点位数量不少于2×6个(点位数量不少于12个,至少2行6列),单侧脸颊区域识别点位数量不少于5×5个(点位数量不少于25个,至少5行5列)。
1.3.4 屏幕监控相机
屏幕监控相机用于监控热玛吉主机屏显,以及识别故障代码、打点完成和打点异常信号。
1)屏幕监控相机中心焦距约350mm,视野面积约250mm×250mm;
2)相机软件需自动识别故障代码及其对应的异常情况(急停、暂停、结束),并给机械臂发送相应信号;
3)相机需在可靠的机械连接位置固定。
1.4 软件设计
1.4.1 触控操作一体机系统
触控操作一体机系统用于提供人机操作界面及系统设定,需具备以下功能:
1)可以选择打点区域(额头、左脸颊、右脸颊);
2)可以选择打点区域的起始点位,操作时需避开客户面部敏感位置,打点顺序可自动调整;
3)提供打点区域实时画面,网格识别序号需逐一标注,由操作医师选择起始点;
4)具备一键标定功能,用于机械臂和相机拆装以及位置变更后的重新标定。
1.4.2 专家决策系统
当机器人系统发生故障时,专家决策系统把异常警报信息与数据库的决策数据进行匹配,触控显示一体机上显示决策建议结果,医师或护士可以根据决策建议进行操作。
1.4.3 姿态变动监控单元
姿态变动监控单元可实时监控客户头部姿态变化情况,当客户面部网格点位变化超过±1.5mm时将触发报警,机器人系统便停止工作。机器人系统复位后自动重启区域扫描,机械臂根据点位顺序依次完成剩余点位的打点工作。
1.4.4 面部温度监控单元
面部温度监控单元可实时检测打点枪工作时面部周边皮肤温度的变化情况,温度检测误差不大于±0.2℃。
在实际应用过程中,护士首先把网格纸转印至客户面部(额头和左右脸颊),分配打点区域和点位后予以标记,然后利用3D相机扫描面部打点区域后自动建模,识别客户面部网格位置并转换到机器人坐标系下,最后机器人系统对准网格采用恒力打点,医美机器人系统全流程如图2所示。
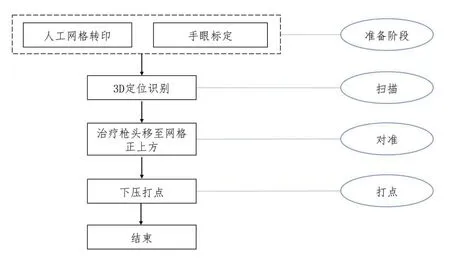
图2 医美机器人系统流程
2.1 手眼标定算法
要实现像素坐标与实际坐标之间的转换,首先需要对医美机器人机器视觉系统进行手眼标定。机器人手眼标定即为机器人坐标系与相机坐标系之间转换关系的标定[4-6]。笔者采用12×9棋盘格做手眼标定算法测试,如图3所示。手眼标定过程中始终保持棋盘格相对基座的位置关系不变,变换机器人末端位姿可计算出误差最小的手眼矩阵,并对棋盘位置进行计算得出测量误差。
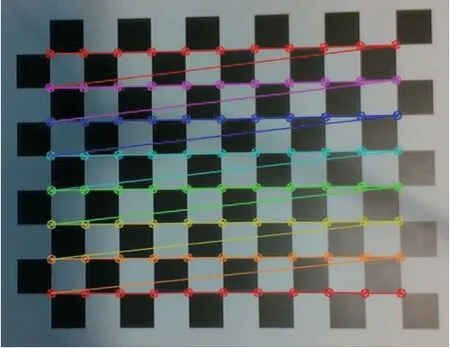
图3 计算过程中的棋盘格
通过手眼矩阵计算标定过程中,棋盘格在相机坐标系下的位置,具体如图4所示。由图4可知,手眼标定结果显示误差在2mm以内,满足机器人系统要求。
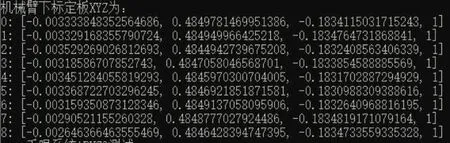
图4 手眼标定结果验证
2.2 恒力控制算法
为了实现恒力控制,笔者在机械臂末端安装六维力传感器以获取外界接触力。由于恒力方向为机械臂末端法向方向,且力传感器末端需安装枪头,故需要对力传感器进行标定与解耦。在机械臂沿着法线方向运动过程中采用导纳控制方法实时获取法向力,以控制机械臂的运动速度和位置,达到保持恒力的目的[7-8]。导纳控制方法采用基于位置控制的内环和力控制的外环策略,即通过二阶导纳模型生成一个附加的位置,该附加位置再去修正预先设定的位置轨迹,最终送入位置控制内环,完成最终的位置控制。
机械臂导纳模型为:


进一步积分可得:

本文通过恒力(-6.5N)对医美机器人系统进行恒力控制算法测试,首先利用模拟面部的曲面模型做模拟测试,面部曲面模型的三维曲面建模的空间曲面和计算得到的法向量如图5所示,图中枪头的法线方向以直线标出。机械臂及枪头测试结果如图6所示,由结果可知,枪头与模型贴合状况良好。

图5 面部曲面模型建模

图6 机械臂及枪头测试
笔者团队还在志愿者面部脸颊上进行了打点测试,志愿者面部的三维建模空间曲面和计算得到的法向量如图7所示,志愿者面部打点测试如图8所示。测试结果显示,实际接触力与系统设定的恒力值之间最大误差为4.92%,满足医美机器人系统要求,具体如图9所示。

图7 志愿者面部三维建模

图8 机器人对志愿者面部打点测试
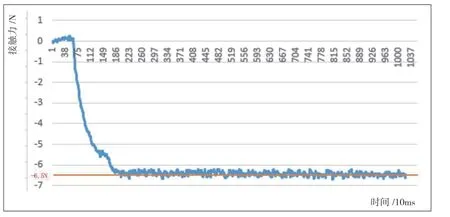
图9 恒力控制算法测试
为了解决医师在热玛吉治疗过程中长时间、重复性工作的痛点问题,本文设计了一款用于热玛吉治疗的医美机器人系统,以辅助医师执行打点操作。该机器人系统可提高热玛吉人工打点操作的标准化程度,降低操作医师的劳动强度。同时因热玛吉治疗方案需根据客户的皮肤状况、疼痛耐受度及个性化需求做相应调整,故给医师的操作能力提出了很大的挑战,医美机器人系统的研究有望解决医美行业的痛点问题,缓解专业医生短缺的压力。
猜你喜欢 玛吉手眼恒力 观察力、手眼协调能力意林(儿童绘本)(2020年2期)2021-01-07培养手眼协调能力,创意思维能力意林(儿童绘本)(2020年2期)2021-01-07我和驴子玛吉润·文摘(2020年12期)2020-12-23Sing Softer, Maggie 轻点唱,玛吉中学生英语·阅读与写作(2020年5期)2020-08-13观察力、手眼协调能力意林(儿童绘本)(2019年12期)2020-01-04培养手眼协调能力,创意思维能力意林(儿童绘本)(2019年10期)2019-12-23百舸争流 奋楫者先——十一化建大连恒力项目转观念 拓市场 结硕果石油化工建设(2019年4期)2019-10-10亏损的恒力石化装入恒力股份引发普遍争议投资者报(2017年18期)2017-05-13从酒驾之治见证法治恒力汽车与安全(2016年5期)2016-12-01爱情针法故事会(2008年4期)2008-01-13 相关热词搜索:恒力,机器人,控制,





