火箭起飞段的激光主动融合轨迹测量技术
时间:2023-03-10 16:40:05 来源:千叶帆 本文已影响人
师恒,高昕,李希宇,雷呈强,胡蕾,宗永红,郑东昊,孙锐
(1 北京跟踪与通信技术研究所,北京 100094)
(2 中国科学院西安光学精密机械研究所,西安 710119)
(3 中国科学院空间精密测量技术重点实验室,西安 710119)
(4 青岛海洋科学与技术国家实验室发展中心,山东 青岛 266237)
近年来,随着航天技术的不断发展,越来越多的新型火箭运用到航天发射中,火箭垂直起飞段的高精度轨迹数据可用于评定火箭的技术性能和精度[1],也可为火箭的改进设计和定型提供数据参考,同时也为火箭起飞安全控制系统提供重要的轨迹参考数据[2]。
火箭垂直起飞段的轨迹只有垂直上升方向的变化,水平面两个方向的轨迹理论上没有偏移。但在实际发射过程中,由于各种干扰以及对火箭的实时控制存在一定的时延和偏差,火箭水平面的实际轨迹不可避免会存在一定的偏移。
国外早期的航天火箭试验主要依靠光电测量设备,精确实现发射轨迹和位姿测量。后期将光电设备与无线电测距系统综合为一体,取长补短,互为补充。美国采用多星高轨GPS 的测量体制,将GPS 技术应用于靶场外弹道轨迹的高精度测定中[3],为靶场各类设备外弹道的设计、检验及修正,提供了前所未有的技术支持。国外在激光雷达的研制方面取得了很多成果,具有代表性的改进型Firepond 单脉冲激光雷达[4],解决了高精度、高刚度、小惯量的跟踪技术,跟踪精度达到0.2″,可高精度识别测量火箭发射的运动数据。近年来,经过开发研究,美国空军试验室将激光雷达的精度从0.45 m 提高到了0.015 m,为高精度测量火箭的轨迹数据奠定了基础[5]。
我国火箭轨迹测量主要采用传统的遥测[6]、光学[7-8]和无线电雷达[9-10]等测量方法。遥测系统由于火箭发射带来的振动使得该阶段轨迹测量精度不高,且在火箭发生故障后较难得到有效的原始分析数据。光学测量系统利用多站拍摄的图像事后交会获取火箭轨迹数据,但其易受天气影响,且实时性较差。无线电雷达由于地面杂波的干扰,在此阶段也很难获取有效轨迹数据。随着我国对双星定位系统的完善,北斗定位系统也在逐步由陆基测控网向航天测量发展,未来将成为一种非常重要的外弹道测量系统[11]。
由上述研究现状可见,目前火箭垂直起飞段的轨迹测量存在以下3 个问题:1)缺失起飞段的有效轨迹测量数据;
2)轨迹测量精度较低;
3)无法实时获取轨迹测量数据。随着新时期航天火箭发射日趋繁重与复杂,考虑到火箭在起飞段离发射塔架距离很近,是安全隐患较多且事故易发的阶段,只有实时精确地测量出火箭起飞段的轨迹数据,才能实时高精度地控制火箭的飞行轨迹,进而提高火箭发射的可靠性,保证火箭的安全发射。综上,依据现阶段的测量手段,亟待通过新型测量方法填补火箭起飞阶段的测量数据空白,实时获取轨迹测量数据,且要求测量精度达到厘米级。
采用单台激光雷达[12-13]理论上可以完火箭起飞段的轨迹测量,但是火箭垂直起飞段在水平面两个方向的轨迹数据变化很小,仅依靠单台激光雷达测量水平两方向轨迹会造成较大误差。本文采用两台激光雷达融合测量火箭轨迹数据,可覆盖火箭更大角度范围的目标区域从而获取更多的目标测量点,不仅可以提高激光点云数据的拟合精度和轨迹测量精度,还能有效保证轨迹数据测量的可靠性。
针对火箭垂直起飞段实时轨迹测量数据的缺失以及单台激光雷达测量可靠性不足等问题,本文提出了基于两台激光雷达的火箭起飞段轨迹融合测量系统及测量技术,采用激光点云数据修正[14-15]、火箭目标区域轨迹初值解算[16]和两台轨迹数据融合处理算法[17-18],计算并分析得到激光雷达静态与动态轨迹测量精度。通过火箭发射试验,实现了火箭垂直起飞段实时高精度的轨迹测量,验证了融合测量系统的可行性和正确性,实时高精度轨迹可作为火箭发射起飞段的安控数据源,保证火箭的安全发射,具有重要的工程应用价值。
测量系统由两台多线激光雷达、二维精密转台、安装架、隔振平台、控制器和数据处理系统组成,搭建完成的两套激光雷达融合测量系统示意如图1。

图1 两台激光雷达融合测量系统Fig.1 Two lidars fusion measurement systems
其中多线激光雷达用于发射激光,扫描火箭的目标区域从而获取激光点云数据。多线激光雷达通过安装架安装于二维精密转台,测量系统整体安装在隔振平台,用于隔离火箭发射过程中的振动影响。在火箭发射前,两台激光雷达共同扫描火箭中上部目标区域,计算并分析测量系统的静态与动态轨迹测量精度。在火箭垂直起飞过程中,二维精密转台实时接收火箭目标区域的轨迹数据,根据火箭位置信息引导激光雷达高精度跟踪扫描火箭起飞全过程,实时高精度输出火箭的轨迹数据。由于两台激光雷达的最远作用距离是210 m,在测量过程中,以火箭助推器底部为参考,激光雷达1 距离火箭约为160 m,因此最远可看到火箭离地约136 m 的高度;
激光雷达2 距离火箭约为170 m,因此最远可看到火箭离地约123.3 m 的高度。
控制器和数据处理系统集成于计算机中,其中控制器用于解算火箭实时位置信息并发送控制指令引导激光雷达高精度跟踪扫描火箭目标区域,数据处理系统用于融合解算火箭目标区域轨迹数据。
2.1 激光点云数据修正
多线激光雷达扫描火箭箭体能得到每个测量点的激光点云数据(Ai(tj),Ei(tj),Ri(tj)),其中Ai(tj)为第i台激光雷达在第j时刻获取的水平角度,Ei(tj)为第i台激光雷达在第j时刻获取的垂直角度,Ri(tj)为第i台激光雷达在第j时刻获取的距离值,本文如无特殊说明,均取i=1,2;
j=1,2,…,n。由于二维精密转台在测量过程中根据火箭位置信息实时跟踪火箭,因此激光点云数据的测量值需叠加转台的水平与垂直角度从而得到修正后的激光点云数据,可表示为

式中,θAi(tj)和θEi(tj)分别为第i台激光雷达对应的二维精密转台在第j时刻获取的水平角度和垂直角度。由于修正后的激光点云数据是极坐标系下的数据,为了便于后续计算,需将激光点云数据转换至雷达坐标系下。如图1,分别在两台激光雷达处建立两个雷达坐标系(OLi-XLiYLiZLi),将激光雷达安装位置中心设置为原点OLi,XLi轴正向指向火箭方向,YLi轴铅垂向上为正,ZLi轴与其他两轴构成右手直角坐标系。则各个测量点的激光点云数据可通过式(2)转换至雷达坐标系下,即

式中,(xLi(tj),yLi(tj),zLi(tj))为第i台激光雷达第j时刻在雷达坐标系下各个测量点的坐标数据。
2.2 火箭目标区域轨迹初值解算
火箭目标区域可近似看作圆柱体,因此激光雷达以特定的仰角扫描火箭时,每一束激光扫描得到的各个测量点在水平面的投影为椭圆形状。由前期研究成果[12]可知,根据每条激光扫描线得到的测量点可拟合得到椭圆方程与椭圆圆心平面坐标,再结合激光雷达各条扫描线对应目标点的空间高度坐标,即可计算火箭目标区域拟合后的椭圆圆心在雷达坐标系下的空间坐标为。本文将火箭目标区域的椭圆圆心坐标作为火箭的轨迹数据。
与单台激光雷达测量系统[12]相比,两台多线激光雷达在垂直方向的视场均可达到25°,且均有128 条激光扫描线同时扫描火箭目标区域,此外两台激光雷达以70°交会角度进行融合测量,可覆盖火箭更大角度范围的目标区域,因此能够扫描获取更多的目标测量点,不仅可以提高椭圆圆心的拟合精度,还能有效保证轨迹数据测量的可靠性。
为了将获取的火箭目标区域中椭圆圆心的轨迹测量数据与遥测、光学和其它雷达装备进行比对验证,需将雷达坐标系下椭圆圆心的轨迹测量数据通过坐标转换至火箭发射坐标系下。由图1 可知,火箭坐标系(OR-XRYRZR)原点OR位于竖直于火箭发射台的中心,XR轴位于过原点的水准面内,正向指向正北方向,YR轴铅垂向上为正,ZR轴与其他两轴构成右手直角坐标系。根据式(3)将两台激光雷达测量得到的雷达坐标系下椭圆圆心的轨迹测量数据进行融合求解,将轨迹测量数据转换至火箭发射坐标系下,即

式中,(xr(tj),yr(tj),zr(tj)) 为第j时刻在火箭发射坐标系下火箭目标区域的轨迹初值测量数据;
(x0i(tj),y0i(tj),z0i(tj))为第i台激光雷达第j时刻对应雷达坐标系原点在火箭发射坐标系中的坐标数据;
RziUri为雷达坐标系与火箭发射坐标系之间的坐标系转换旋转矩阵,ξri和ηri分别为第i台激光雷达测量位置处垂线偏差的子午分量和卯酉分量[16],,θLi为第i台激光雷达的雷达坐标系与火箭发射坐标系之间的旋转角度。
2.3 两台轨迹数据融合处理算法
利用2 台激光雷达融合求解火箭目标区域的轨迹数据可提高火箭轨迹测量精度。两台激光雷达同时扫描火箭的目标区域时,在每一个时刻均有6 个已知测量信息,而火箭目标区域的未知轨迹坐标数量为3 个,因此存在冗余测量信息,本文采用最小二乘估计来解算并修正轨迹数据。
假设(xsi(tj),ysi(tj),zsi(tj))为第i台激光雷达第j时刻在火箭发射坐标系的站址坐标,根据式(4)将火箭目标区域的各个测量点在火箭发射坐标系下的轨迹数据反算到雷达坐标系下,得到雷达坐标系下的反算轨迹数据为



根据反算激光点云数据,通过式(7)计算两台激光雷达融合目标区域在火箭发射坐标系下的轨迹数据修正量(Δxr(tj),Δyr(tj),Δzr(tj))的最小二乘估计。


式中,δ为任意小的正实数。当满足迭代约束条件时,得到修正后的火箭发射坐标系下目标区域的轨迹测量数据为

由上述融合解算过程,可得到火箭目标区域在火箭发射坐标系下修正后的精密轨迹测量数据(xr(tj),yr(tj),zr(tj))。与单台激光雷达测量系统相比,两台激光雷达融合测量系统可提高火箭轨迹测量精度。
3.1 火箭轨迹测量试验平台
为验证提出的两台激光雷达融合测量系统及测量方法的可行性与正确性,在某火箭发射中心测量了火箭垂直起飞段的轨迹数据。将两台激光雷达融合测量系统安装在某火箭发射场的可观测位置点位,多线点云激光雷达采用时间飞行测量法,由激光雷达发出激光脉冲信号,当脉冲信号被火箭箭体反射后沿原路返回,经过两倍被测距离后被激光探测器接收,所用的飞行时间间隔t与被测距离值D的关系为

式中,c表示光速。
激光雷达采用镭神智能CH128×1 的128 线激光雷达。在垂直方向共有128 条激光扫描线同时扫描火箭目标区域,激光雷达测量波长为905 nm(火箭发射时尾焰在2 000~5 000 nm 的波段达到辐射峰值[13],其波长避开了尾焰峰值光谱,基本不受影响),作用距离为210 m,测量帧频设置为10 Hz,水平视场角为120°,垂直视场角为25°。在测量精度方面,距离测量精度可以达到2 cm,水平角度分辨率为0.2°,垂直角度分辨率为0.125°。
激光雷达1 距离火箭约为160 m,激光雷达2 距离火箭约为170 m,且两台激光雷达之间的夹角约为70°,如图2。

图2 火箭轨迹测量试验布站分布Fig.2 Distribution of test stations for rocket trajectory measurement
3.2 轨迹测量精度计算与分析
3.2.1 静态轨迹测量精度
静态轨迹测量精度主要影响因素包括激光雷达距离测量误差、箭体的圆度误差、椭圆拟合误差、圆心拟合误差、角度修正误差以及数据处理误差。静态轨迹测量精度以均方根可表示为

式中,Δdi为静态轨迹测量的误差之和,n为测量数据个数。
在火箭发射前,利用两台激光雷达静态扫描火箭箭体特定区域,通过融合数据处理算法计算得到目标区域的静态空间坐标,将静态坐标与理论值相比可得到测量系统静态轨迹测量精度。火箭静止时,各个方向轨迹的偏移量的理论值看作为0,将两台激光雷达静态测量数据融合后,得到火箭目标区域各个方向轨迹偏移结果如图3。

图3 静态各方向轨迹偏移Fig.3 Static trajectory offset in each direction
图3 中,各个方向的轨迹偏移最大值、最小值和均方根值如表1。

表1 静态各方向轨迹偏移数值Table 1 Static trajectory offset value in each direction
由表1 可知,在火箭静止时,激光雷达测量X、Y、Z方向的最大误差值分别为0.007 5 m、0.023 5 m 和0.010 3 m,通过三个方向的轨迹偏移数值,从而计算得到激光雷达测量系统的静态轨迹测量精度。
3.2.2 动态轨迹测量精度
在目前关于火箭起飞段轨迹测量系统及测量方法中,激光雷达测量系统的精度是最高的,其他测量设备无法对其动态轨迹测量精度进行标定。因此依据火箭发射时对测量精度的影响因素,分析并计算动态轨迹测量精度。火箭发射过程中激光雷达动态轨迹测量精度主要影响因素除包含静态轨迹测量误差之外,还有振动影响误差、尾焰干扰误差和精密转台跟踪误差,动态轨迹测量精度以均方根可表示为

式中,Δdv为振动影响误差,Δdf为尾焰干扰误差,Δdg为跟踪误差,n为测量数据个数。
根据相关参考文献与试验数据[12],前期在测量点位通过加速度计测量得到火箭发射过程中振动误差约为0.01 m。经过多次火箭发射试验测试,通过对比有少量尾焰与无尾焰干扰时的激光测距相对误差,根据多次测试与试验得出尾焰干扰误差约为0.015 m。本文采用的二维精密转台的跟踪精度约为27.5″,根据两台激光雷达与火箭的距离,可以计算得到二维精密转台的跟踪误差约为0.022 m。再由静态3 个方向各个时刻的测量误差可解算静态轨迹测量精度,将动态测量精度影响因素数值代入式(12)计算动态测量精度,激光雷达测量系统的静态与动态轨迹测量精度如图4。

图4 静态与动态轨迹测量精度Fig.4 Static and dynamic trajectory measurement accuracy
图4 中静态与动态测量精度最大值、最小值和均方根值如表2。

表2 静态与动态轨迹误差数值Table 2 Static and dynamic trajectory error values
由表2 可知,激光雷达测量系统的静态与动态轨迹测量误差最大值分别为0.023 5 m 和0.036 6 m,本文将静态与动态的最大误差值作为激光雷达测量系统的静态与动态轨迹测量精度。
3.3 火箭垂直起飞段实时轨迹测量试验
在火箭发射前,两台激光雷达共同扫描火箭中上部目标区域,获取火箭初始空间位置。在火箭垂直起飞过程中,将实时火箭目标区域的轨迹数据发送至二维精密转台,二维精密转台根据火箭位置信息高精度引导激光雷达跟踪扫描火箭垂直起飞段全过程,实时获取并输出火箭的轨迹数据。
由于火箭起飞段的绝对轨迹数据涉及秘密,因此本文以火箭发射坐标系原点为基准,图5 给出了火箭垂直起飞过程中各个方向的实时相对轨迹数据曲线,图6 为火箭垂直起飞段三维激光点云轨迹及三维成像效果。

图5 火箭垂直起飞段各方向相对轨迹曲线Fig.5 Relative trajectory curve of rocket in each direction during vertical takeoff phase
图6 中火箭目标区域X、Y、Z方向的实时相对轨迹的最大值和最小值如表3。

表3 火箭各方向实时相对轨迹数值Table 3 Real time relative trajectory value of rocket in each direction
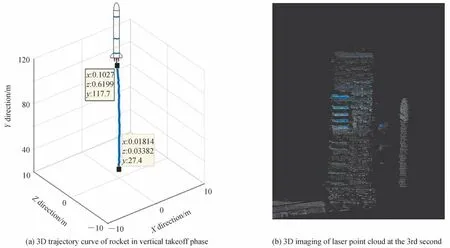
图6 火箭垂直起飞段三维轨迹及成像效果Fig.6 3D trajectory and imaging effect of rocket in vertical takeoff phase
由火箭垂直起飞段实时轨迹测量试验可得出以下结论:
1)目前,靶场在运载火箭飞行过程中利用遥测地面站兼容GPS 系统进行外弹道跟踪测量,由于火箭起飞过程中存在剧烈的振动和大量的尾焰干扰,因此轨迹测量精度接近米级量级。在光学测量方面,西昌、文昌、岢岚等发射场研制有XX-1302、XX-1313、XX-1317 等多套测量系统,测量结果根据拍摄图像事后交会测量获取,现有测量结果表明:测量精度在0.18 m 左右。本文提出的激光雷达测量系统通过测量精度计算分析以及火箭发射试验验证,结果表明:激光雷达的动态融合轨迹测量精度为0.036 6 m。
2)针对提出的两台激光雷达融合轨迹测量系统及测量方法,采用激光点云数据修正、火箭目标区域轨迹初值解算和两台轨迹数据融合处理算法,有效提高了火箭轨迹的实时测量精度和测量可靠性,具有重要的工程应用价值。
3)两台激光雷达融合测量系统实现了火箭垂直起飞段实时高精度轨迹测量与数据输出,有效填补了火箭该阶段的轨迹测量数据的空白,保证了火箭发射安全。
针对火箭垂直起飞段实时轨迹测量数据的缺失以及单台激光雷达测量可靠性不足等问题,提出了火箭起飞段的新型两台激光雷达融合轨迹测量系统,该系统具有布站方便、易安装、功耗低等优点,同时受天气影响、地面杂波信号以及火箭振动的影响较小,能有效获取火箭实时轨迹数据。将两台激光雷达分别安装于二维精密转台构成融合测量系统,在火箭发射前,两台激光雷达共同扫描火箭中上部目标区域,采用激光点云数据修正、火箭目标区域轨迹初值解算和两台轨迹数据融合处理算法,计算并分析得到激光雷达静态与动态轨迹测量精度分别为0.023 5 m 和0.036 6 m。在火箭垂直起飞过程中,二维精密转台实时接收火箭目标区域的轨迹数据,根据火箭位置信息引导激光雷达高精度跟踪扫描火箭起飞全过程,实现了火箭垂直起飞段实时高精度的轨迹测量,有效填补了该阶段的轨迹测量数据的空白,保证了火箭发射安全。截至目前为止,基于激光雷达的火箭实时轨迹融合测量系统已在某火箭发射中心成功完成了多次试验任务,在火箭起飞段存在振动、尾焰等环境干扰条件下,实时动态轨迹测量精度均能优于0.05 m,验证了本文所提的测量系统及测量方法能有效提高火箭轨迹的测量精度和可靠性,具有重要的工程应用价值。
猜你喜欢 激光雷达静态坐标系 手持激光雷达应用解决方案北京测绘(2022年5期)2022-11-22独立坐标系椭球变换与坐标换算导航定位学报(2022年2期)2022-04-11最新进展!中老铁路开始静态验收云南画报(2021年8期)2021-11-13法雷奥第二代SCALA?激光雷达汽车观察(2021年8期)2021-09-01静态随机存储器在轨自检算法北京航空航天大学学报(2021年6期)2021-07-20基于激光雷达通信的地面特征识别技术中国交通信息化(2019年1期)2019-03-26基于激光雷达的多旋翼无人机室内定位与避障研究电子制作(2018年16期)2018-09-26解密坐标系中的平移变换中学生数理化·七年级数学人教版(2018年4期)2018-06-28坐标系背后的故事数学大世界(2018年1期)2018-04-12油罐车静态侧倾稳定角的多体仿真计算专用汽车(2015年1期)2015-03-01 相关热词搜索:起飞,轨迹,测量,





