面向车载导航激光雷达的光学系统优化设计*
时间:2023-03-23 12:00:03 来源:千叶帆 本文已影响人
徐子奇,王美娇,鞠秀晶
(长春电子科技学院,吉林 长春 130114)
智能导航系统[1]是未来汽车智能化的重要目标,现有超声雷达等避障设备随着路况环境和应用环境的升级很难再满足要求,尤其是不能进行有效目标识别的前提下,往往无法实现智能导航的目标。
激光雷达技术是国际公认的智能驾驶技术基础[2],为了获取更好的测试效果,激光雷达的光学系统成为了一项研究热点[3]。激光雷达回波信号的接收有牛顿式望远镜[4]、格里格拉式望远镜[5]、卡塞格林式望远镜[6]以及伽利略式望远镜[7]。牛顿式结构最简单,且成本低,但由于其探测器与结构不同轴,对系统稳定性要求高;
格里格拉式望远镜的成像效果较好,但由于需要采用非球面加工,工艺复杂成本高;
卡塞格林式望远镜采用2次成像的方式扩大了系统的接收视场范围,有利于提升成像质量,但反射式结构设计会使部分回波光强受到损失;
伽利略式望远镜结构简单、体积小,虽然成像质量不高,但在本系统应用中主要以获取目标位置点能量强度为主,故可以忽略成像误差造成的不足,并且采用准直聚焦的方式捕获光斑能量成为主要目标。文献[8]提出了一种基于牛顿式望远镜结构的卫星激光雷达系统,接收孔径达20 cm,光学接收面到探测器距离约35 cm,具有较好的测试视场。Velodyne公司推出配合小型化光学接收模块,其总体积仅有常规激光雷达的1/5,其光学结构采用了最简单的伽利略望远镜结构,并通过阵列组合实现视场覆盖[9]。Quanergy公司在车载激光雷达中采用了光学相控阵,其M8—1系列产品具有很好的三维目标识别能力[10]。中国科学院安徽光学精密机械研究所[11]设计研制的AML—1型车载激光雷达中采用了直径300 mm的牛顿型望远镜,测试视场0.2~1.6 mrad。哈尔滨工业大学刘满林[12]研究的扫描式激光雷达采用了开普勒型望远镜结构,并配合光纤束实现了目标获取。
之前的研究重点是远距离的目标识别,而本文针对近场(工作距离100 m以下)条件及车载状态干扰的情况,提出了对激光雷达光学系统的优化设计。
基于激光雷达三维点云的智能导航系统主要包括4部分:发射模块、接收模块、采集模块与处理模块,其原理结构如图1所示。

图1 智能导航中激光雷达测量系统结构
发射模块包括方位控制、激光器和准直器。方位控制通过调整转动机构使激光器朝向需要获取点云数据的方向;
接收模块包括光阑、准直及聚焦部分,通过光阑控制视场范围,再通过准直聚焦是反射光汇聚在雪崩光电二极管(aralanche photo diode,APD)传感器[13]上。采集模块包括滤波整形与APD传感器,完成回波光信号的采集与滤波降噪。处理模块由PC机完成数据处理,最终将相应的点云数据进行重建。
2.1 三角法测距
因为本文激光雷达拟应用于车载三维导航领域[14,15],故考虑其测试距离范围与时间响应要求的基础上,系统采用三角法测距方式。设激光器光轴与传感器APD光轴的距离为L,系统焦距为f,则像面上任意点x在目标移动后两个测量值之间的差为Δx,则有函数
(1)
式中z为目标到测试系统的距离,z0为初始距离。则z可以写成
(2)
可见,通过三角法计算出所有测试点的距离后,就能构成待测区域的点云集合,实现目标识别,为避障及路径规划提供数据支撑。
2.2 光学系统
为了提高基于点云数据的目标识别精度,研究了适用于本文设计需求的光学接收发射模块,在基模条件下,传输光束的高斯表达[16]有

(3)
式中ω(z)和ω0分别为光束直径和其束腰位置,q0为共焦位置参数,R(z)为曲率半径,φ(z)为相位,k为波矢量。
采用望远系统实现激光扩束准直,利用压缩发散角的方式集中能力,从而实现校正波面的效果,其扩束比满足
ω2q0=fω1
(4)
式中ω1和ω2分别为入射与出射时的光波束腰,f为焦距,q0为共焦位置参数。故提高扩束比可以通过增大焦距实现,但为了避免大幅增加光学系统长度,故采用双透镜组合的方式,第一片采用缩束的同时第二片完成扩束作用,有
ω2=(f2/f1)·ω1
(5)
3.1 发射模块
发射模块需要将光源出射光准直扩束,并降低发散角。由于车载应用为了减小光学系统的体积,并且避免因共焦而导致能量过于集中,故设计了倒置型伽利略望远结构。其主要参数包括中心波长1 064 nm,激光光斑的直径为8.0 mm,扩束能力为8倍,通过ZAMAX仿真其结构设计如图2所示。
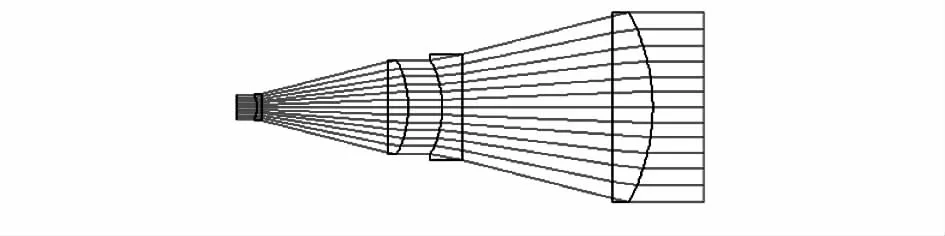
图2 发射模块设计
发射模块由2组伽利略系统构成,第一组实现4 倍率扩束,使光束扩束至φ32 mm,然后再经过第二组2倍率扩束,最终达到φ64 mm。在保证8倍率扩束的基础上完成发射模块光学系统优化。
3.2 接收与准直模块
接收部分为了获取尽可能多的光能量,从而提高APD上的响应强度,增大信噪比。其光学特点为大孔径,故重点对系统球差进行校正。激光雷达的测试范围与信噪比也均受到回波强度的影响,故接收部分的入瞳直径可以在系统允许范围内取最大,测试过程中采用40 mm。APD感光面为400 μm,为了保证接收光有效实现光电转换,聚焦后光斑直径应小于感光面直径。为了进一步保证车载应用中对体积的要求,相对孔径选择为1/1.2,则其焦距有48 mm,光学系统总长为65.46 mm,材料为BK7。在此技术指标的基础上,设计透镜的聚焦参数如表1所示,其输出图与像差如图3所示。

表1 优化前聚焦透镜参数
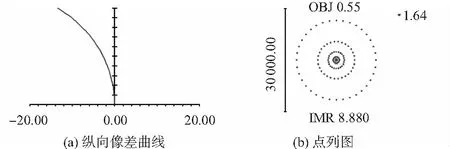
图3 纵向像差曲线及点列图
采用单透镜虽然结构简单,但是光斑聚焦效果差,其球差效应会造成能量损失,纵向像差结果如图3(a);
当孔径进一步增大时,球差也会更大,全孔径位置上其值达到最大值-13.5 mm,如图3(b)。其点列图可以得到光斑均方根的半径值为4.25 mm,远大于系统40 mm孔径的设计要求,故需要进行参数优化。
为了在保证系统体积的基础上减小光斑直径,采用非球面设计,改善其能量分布状态,并且保证原有的透过性能。通过仿真分析可知,双凸透镜中的后一级球面对球差贡献更大,故针对第二级球面进行优化。定义其曲面矢高函数在有
(6)
式中c为曲率,r为透镜半径,k为曲面系数。
通过调节k的值可以对面型进行设置,优化后的系数如表2所示,第一面采用平面,而第二面采用非球面。优化后的纵向像差及点列图如图4所示。

表2 优化后聚焦透镜参数
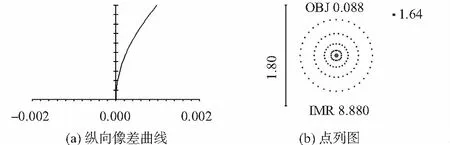
图4 优化后纵向像差曲线及点列图
如图4(a)可知,经过优化后接收系统对应的纵向像差得到很大改善,剩余球差最大值只有1.0 μm。如图4(b)可知,光斑能量集中程度更好了,其均方根半径低至0.23 μm,光斑有效直径为0.37 mm以内,满足0.4 mm的系统设计要求和技术指标。为了进一步验证能量符合设计要求,对90.0 %以上能量的光斑范围进行分析,包围圆仿真结果如图5所示。
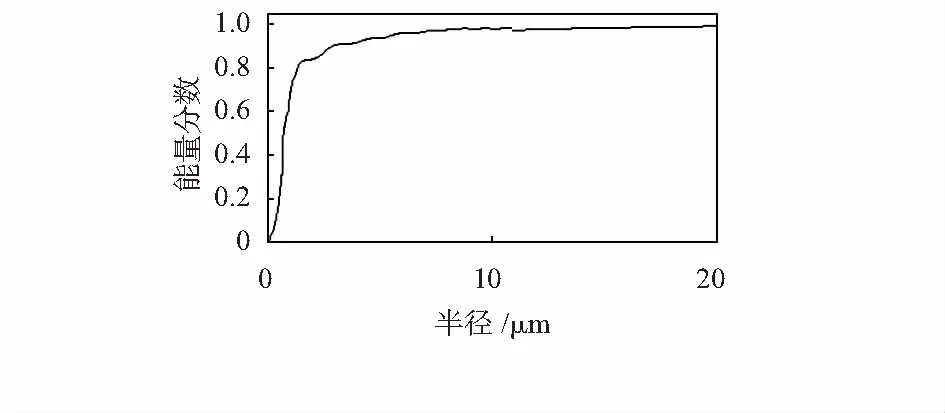
图5 能量分布曲线
4.1 测试系统搭建
实验中将优化后的透镜组封装在一起,并与APD光电传感器对接,完成目标区域的激光回波信号采集,测试数据与优化前光学系统得到的光斑结果进行对比,光学成像系统框图与系统实物如图6所示。

图6 测试系统结构与实物
4.2 光斑优化结果对比
在获取目标回波光强信息前,首先,采用二维CMOS传感器放置于APD探测器光敏面位置测试光斑优化效果,在确认光斑在该位置上具有最佳聚焦效果后再采用APD探测器。采用APD点源响应速度快,适用于快速扫描,而调整APD光敏面上光斑尺寸及位置采用CMOS实现。
由于出射激光的发射角较大,呈椭圆形光斑,会对测试结果造成影响,降低测试精度,并且能量的分散不利于系统信噪比的提升,故采用优化结构后对光束进行了整形,目的是减小光斑直径。结合本文拟应用与车载激光雷达,光学系统不易尺寸过大,故采用2个正交的圆柱透镜完成光斑获取,并且在光束长轴与短轴采用不同的焦距比使光斑横纵尺度相近。实验中,准直透镜材料为K9,其折射率为1.521 2,优化前后的光斑效果如图7所示。

图7 优化前后光斑效果对比
测量光斑直径可知,优化前后分别为4.56 mm(长轴)和0.39 mm,与仿真结果基本一致。由此可见,优化后光斑的能量更集中,并且光斑形状接近圆形,与APD探测器更匹配。
4.3 目标位置精度分析
为了进一步验证采用本结构设计有助于提升基于三维点云获取的目标识别能力,采用同一个目标进行对比测试,以PandarXT激光雷达的点云数据作为标准值,分别对优化前与优化后的特征点位置测量结果进行对比,结果如表3所示。为了保证两个测试的点云具有可比性,实验中,在可测试区域中放置了标定靶标立方体(实物如图6(a)中所示,边长20 cm的正方体,每个面上黏贴5个靶标点,测试视场中可以获得3个相互垂直平面的点云数据,用于完成两测点云数据对齐),从而在每次点云数据获取过程中均可以得到一组标准靶标的点云集合,前后2次测试的点云都统一在该坐标系下就能实现点云数据的对比了。

表3 特征点位置坐标测试结果对比
由于点云数据量很大,无法全部列出,取其中3个特征点(分别在X,Y,Z轴方向具有最大值)进行对比可见,优化前点云位置相对误差范围很大,为5.0 %~19.0 %,平均误差为9.7 %,而优化后的测试数据误差范围大幅降低,为1.0 %~5.0 %,平均误差为2.9 %。验证了优化对系统目标位置精度具有改善作用。
针对智能车载激光雷达导航系统中光学系统尺寸与准直聚焦效果之间矛盾问题,提出了采用光学设计参数优化的方法,设计了与之匹配的非球面面形结构。通过仿真分析对其纵向像差曲线和点列图进行了对比,优化前后的像差及点列分布得到了很好的修正。实验对比了优化前后的光斑半径,并且基于此完成了目标特征点位置的计算,结果显示,采用本优化设计对光斑半径及位置解算精度都具有很好的提升效果。
猜你喜欢 光斑激光雷达望远镜 手持激光雷达应用解决方案北京测绘(2022年5期)2022-11-22神奇的“千里眼”——望远镜中学生数理化·八年级物理人教版(2022年11期)2022-02-14法雷奥第二代SCALA?激光雷达汽车观察(2021年8期)2021-09-01有趣的光斑阅读(高年级)(2019年9期)2019-11-15有趣的光斑阅读与作文(小学高年级版)(2019年8期)2019-10-16夏末物语小资CHIC!ELEGANCE(2019年28期)2019-09-12基于激光雷达通信的地面特征识别技术中国交通信息化(2019年1期)2019-03-26神奇的千里眼——望远镜中学生数理化·八年级物理人教版(2018年11期)2019-01-31基于激光雷达的多旋翼无人机室内定位与避障研究电子制作(2018年16期)2018-09-26打造最大望远镜小哥白尼(趣味科学)(2018年6期)2018-09-14 相关热词搜索:优化设计,激光,面向,





