永磁同步电机混沌运动反步动态面控制
时间:2023-03-26 23:35:02 来源:千叶帆 本文已影响人
王明新,张树凯,李文萍,孙 刚
(1.湖南工学院理学院,湖南 衡阳 421002;
2.湖南高速铁路职业技术学院铁道电信学院,湖南 衡阳 421002)
永磁同步电机(Permanent Magnet Synchronous Motor,PMSM)具有结构简单、功率效率高、调速特性平滑、运行可靠等优点[1-2],因而被广泛应用于汽车工业、航空航天、船舶工程、电力工业以及机械工程等领域[3-7]。在这些应用中,电驱动系统是非常重要的核心部件,而永磁同步电机及其控制系统则是影响电驱动系统最为关键的因素。常用于永磁同步电机控制的技术有直接转矩控制[1,5]、矢量控制[1,8]等。由于永磁同步电机系统存在非线性、多变量等特点,导致对其进行控制的难度大、算法复杂,有时难以达到要求的控制目标或控制精度。近年来,国内外学者基于一些先进的控制理论与技术等,提出一系列有效的永磁同步电机控制设计方法,如自适应控制[9-10]、模糊控制[8,10]、滑模控制[3,9-10]等。
永磁同步电机系统的非线性、多变量特点还可能引起另一个不容忽视的重要问题,即电机系统在某些特定条件下会出现混沌运动状态[11-13],如随机振荡、控制性能不稳定等。这些混沌运动状态有时会对电机系统的运行产生不利影响,甚至可能会对系统产生损害。因此,如何避免有害混沌运动状态的出现或是在混沌状态出现时及时加以抑制或消除,保证系统运行稳定并达到期望的目标就成为永磁同步电机系统控制中一个具有实际意义的问题。针对永磁同步电机运动系统的混沌抑制或消除问题,国内外学者近年来提出了很多有效的控制策略和方法。2008 年,蔡明山[14]针对永磁同步电机混沌运动控制问题给出了一个具有分段二次函数形式的非线性反馈控制器设计方法。为了控制永磁同步电机动力系统中的不良混沌振动,范本正等[15]提出了一个基于自适应反步的滑模变结构非线性控制器设计方法。2009 年,李东等[16]针对参数不确定的永磁同步电机提出了一种基于Takagi-Sugen 模型的模糊控制设计方法。李峰磊等[17]设计了一种具有自抗扰能力的永磁同步电机混沌控制器。唐传胜等[18]针对含有参数不确定性的永磁同步电机混沌系统提出了一种主动有限时间稳定控制设计方法,设计的控制器能够有效提高系统的响应能力。针对永磁同步电机系统状态不完全可测的情况,陈强等[19]提出了基于扩张状态观测器的自适应滑模控制设计方法,改善了滑模控制抖振的问题。侯利民等[20]设计了一种非奇异快速终端滑模控制器。黄俊豪等[21]针对永磁直线同步电机系统提出了基于粒子群算法优化的状态反馈滑模混沌控制器。其他一些永磁同步电机混沌控制设计方法见文献[22-23]等。
反步(Backstepping)是由Krstic 等[24]提出的一种系统化的控制器设计方法,它是将一个高阶非线性系统的控制设计问题分解为多个低阶(或一阶)系统的递归设计问题。文献[15]中的工作就用到了反步设计方法。然而,反步设计存在“复杂程度显著增长”的缺点,即随着被控系统阶数的增加,所设计的控制器复杂性显著增加,从而导致高阶系统的控制器实现非常困难[25]。1997 年,Swaroop 等[25]针对“复杂性问题”提出了一种动态面控制(Dynamic surface control, DSC)技术,即在控制律递归设计过程中加入若干一阶低通滤波器对虚拟控制信号进行处理,将复杂的求导运算转变为简单的代数运算,从而有效降低基于反步设计的控制器的复杂程度。此外,传统的反步设计主要适用于系统具有严格反馈结构的情况。对于不满足严格反馈结构形式的非线性系统,基于反步设计的控制器可能会存在“控制结构循环依赖”的问题,从而无法实现。2011年,Wang[26]将DSC 技术与自适应反步设计相结合,解决了纯反馈非线性系统控制设计中的“控制结构循环依赖”问题。2019年,Sun和Wang[27-28]将反步设计与动态面控制技术相结合,对具有非下三角形结构形式的非线性系统进行了控制器设计。
受上述工作启发,本文对永磁同步电机混沌运动系统控制问题进行了研究,主要工作为:对于给定的永磁同步电机混沌运动系统,利用反步方法递归设计状态反馈虚拟控制律和实际控制律,保证各误差子系统稳定;
使用一阶滤波器对虚拟控制信号进行处理,解决复杂性问题和控制结构循环依赖问题;
给出闭环系统的稳定性分析结果;
对所设计的控制器的有效性进行数值仿真验证。
取永磁同步电机运动系统的无量纲数学模型如下[11,23]:
其中:id、iq和ω分别为经过线性变换后的直轴电流、交轴电流和旋转角速度;
Ud和Uq分别为d轴电压和q轴 电 压;
Tl为 电 机 负 载 转 矩;
r和s为 电 机 系 统参数。
根据文献[11]对电机运动系统的分析可知,当相关参数满足一定条件时系统存在混沌吸引子,从而在状态初始值为不平衡点的情况下系统将进入混沌运动状态。例如,当Ud= -5、Uq= 1、Tl= 1、r=25、s= 3、初始状态为(x1,x2,x3)=(0,0,0)(显然为不平衡状态)时[23],系统会进入到混沌运动状态中,其相轨迹与系统状态随时间变化情况分别如图1 与图2所示。
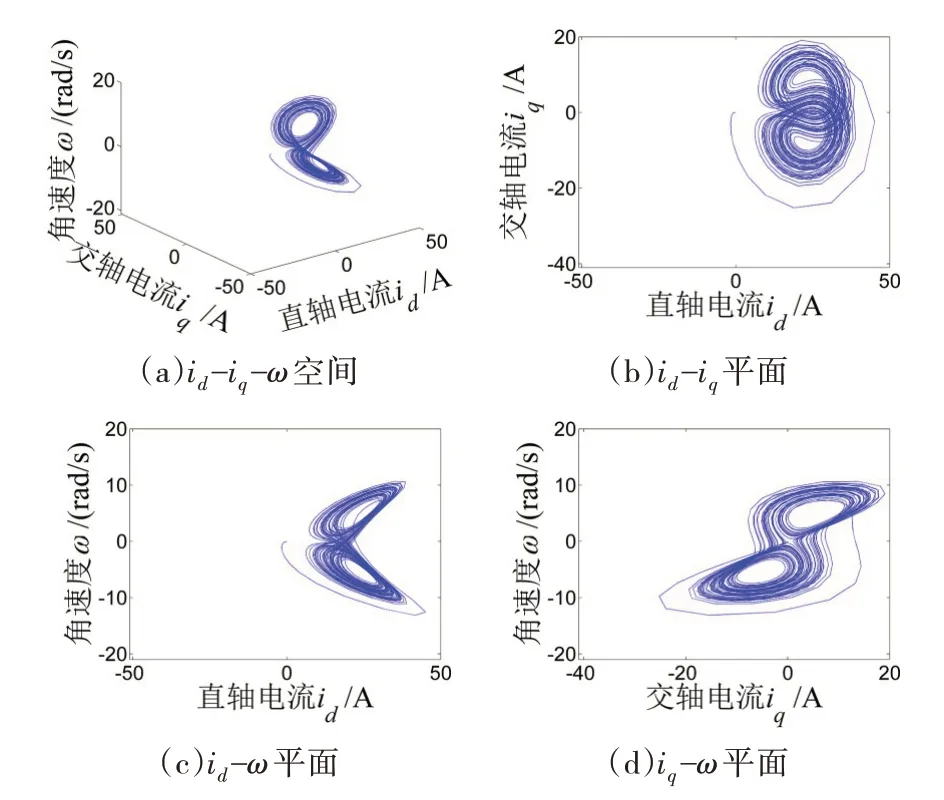
图1 PMSW 系统混沌运动的相轨迹

图2 PMSW 系统混沌运动的状态变化
为了抑制混沌运动状态,需要对系统(1)施加控制。若控制目标为使得系统输出信号能够稳定于设定值,则可得如下形式的永磁同步电机运动控制系统数学模型:
其中:u为由ω-子系统注入的控制输入信号;
y为系统输出信号。
本节将结合反步设计与动态面控制技术对系统(2)构造控制器,最终目标是使得系统输出信号y能够稳定于期望输出信号的设定值yr(常数)。控制器通过反步设计递归实现,分三步完成:第一步是对第一个误差面子系统设计虚拟控制律,保证该子系统稳定;
第二步是对第二个误差面子系统设计虚拟控制律,保证该子系统及第一个误差面子系统稳定;
第三步是对第三个误差面子系统设计控制律,保证该子系统与前两个误差面子系统同时稳定。通过上述过程,设计的控制器由两个虚拟控制律和一个实际控制律构成。需要指出的是,在基于传统反步设计的控制器递归设计过程中,前一步的虚拟控制律的导数需要进入下一步的控制设计中,这将会导致出现“复杂程度显著增长”问题[25]。此外,由于系统(2)具有非仿射结构形式,基于传统反步设计的控制律递归设计过程中还会出现“控制结构循环依赖”问题[26],即某些虚拟控制律或实际控制律的设计依赖于其本身。为此,采用动态面控制技术解决复杂性问题和控制结构循环依赖问题,即令虚拟控制信号先通过一个一阶低通滤波器,然后再进入下一步的设计环节中。通过使用低通滤波器对虚拟控制信号进行处理,一方面可以将复杂的求导运算用简单的代数运算代替,解决“复杂程度显著增长”问题;
另一方面使用滤波器的输出信号而不是原始的虚拟控制信号进入下一步的设计环节中,可以避免“控制结构循环依赖”情况的出现。控制器的具体设计过程如下:
I、令S1=y-yr=id-yr(第一个误差面)。将S1对时间t求导可得:
将iq看作S1-子系统(3)的输入信号(虚拟控制输入信号),并将子系统(3)变换为如下形式:
则虚拟控制输入信号iq的期望值为:
其中k1> 0为控制参数。
令α2经过第一个低通滤波器,可得:
II、令S2=iq-α̂2(第二个误差面)。类似地,将S2对时间t求导可得:
将ω看作S2-子系统(4)的输入信号(虚拟控制输入信号),并将子系统(4)变换为如下形式:
则虚拟控制输入信号ω的期望值为:
其中k2> 0为控制参数。
令α3经过第2个低通滤波器,可得:
III、令S3=ω-α̂3(第三个误差面),则S3对时间t的导数为:
其中u为S3-子系统(5)的输入信号(即系统(2)的控制输入信号)。
令控制输入信号u为:
其中k3> 0为控制参数。
通过上述设计,得到由误差面子系统、控制器以及滤波器子系统所构成的闭环系统,形式记为Σ ={ Σ1,Σ2,Σ3},其中,
误差面子系统为:
控制器为:
滤波器子系统为:
文献[26]对一类不确定纯反馈非线性系统设计了神经网络自适应反步动态面控制器,并利用Lyapunov 稳定性理论证明了由误差面子系统、控制器、滤波器子系统和神经网络自适应律等构成的闭环系统的所有信号半全局一致最终有界。在此基础上,文献[27-28]对具有非下三角形结构形式的一类非线性系统提出了反步动态面控制设计方法,并给出了由误差面子系统、控制器和滤波器子系统等构成的闭环系统所有信号半全局一致最终有界的结论。本文主要应用反步技术与动态面控制技术对具有非下三角形结构形式的3 阶非线性系统(2)设计控制器,得到的闭环系统由误差面子系统Σ1、控制器Σ2和滤波器子系统Σ3构成。因此,根据文献[26-28]给出的稳定性分析结果可知:对于给定的系统初始状态,通过选择控制器参数ki(i= 1,2,3)和滤波器参数τj(j= 1,2),可以保证闭环系统Σ ={ }Σ1,Σ2,Σ3的所有信号半全局一致最终有界,并且可以通过参数调整使得系统输出误差收敛于0的一个任意小邻域内。
从而,系统输出信号y能够稳定于设定值yr。
为了验证所设计控制器的有效性,考虑永磁同步电机运动控制系统的数学模型(2),其中的系统参数取值保持与前文相同,即Ud= -5、Uq= 1、Tl=1、r= 25、s= 3、系统初始状态为(x1,x2,x3)=(0,0,0)。由前面的仿真结果可知,若对该系统不予施加控制,即控制输入信号u恒为零,则系统运动进入混沌状态(见图1~2)。
下面,使用控制器Σ2对系统(2)进行控制,并利用滤波器子系统Σ3对Σ2中的虚拟控制信号进行滤波处理。首先利用MATLAB/SIMULINK 搭建控制系统的仿真模型,然后选取适当的控制器参数和滤波器参数进行数值仿真。当相关参数取值为k1=k2=k3= 2、τ1=τ2= 1、== 0、期望输 出信号的设定值yr= 20时,所得仿真结果如图3~5所示。

图3 PMSW 控制系统运动的相轨迹
由图3~4 可以看出,在未对系统施加控制的时间内(t:0~10 s),系统运动进入混沌状态;
当t= 10 s时开始施加控制,系统运动状态快速地收敛于稳定状态(图3中“*”点位置),即系统的混沌运动状态得到了有效控制。由图4(a)可以看出,在对系统施加控制后,系统输出信号快速地收敛于期望输出信号的设定值,从而验证了所设计的控制器具有良好的控制性能。图5 给出了控制输入信号的变化情况。由图5 可见,在控制施加的初始阶段(t:10~12 s),控制输入信号需要在一个相对较大的范围内(u:-41~44 N·m)变化才能快速抑制系统的混沌运动状态;
当系统进入稳定运动状态后,控制输入信号只需在一个相对较小的范围内(u:-28~-27 N·m)变化即可保持系统输出信号稳定于设定值附近。
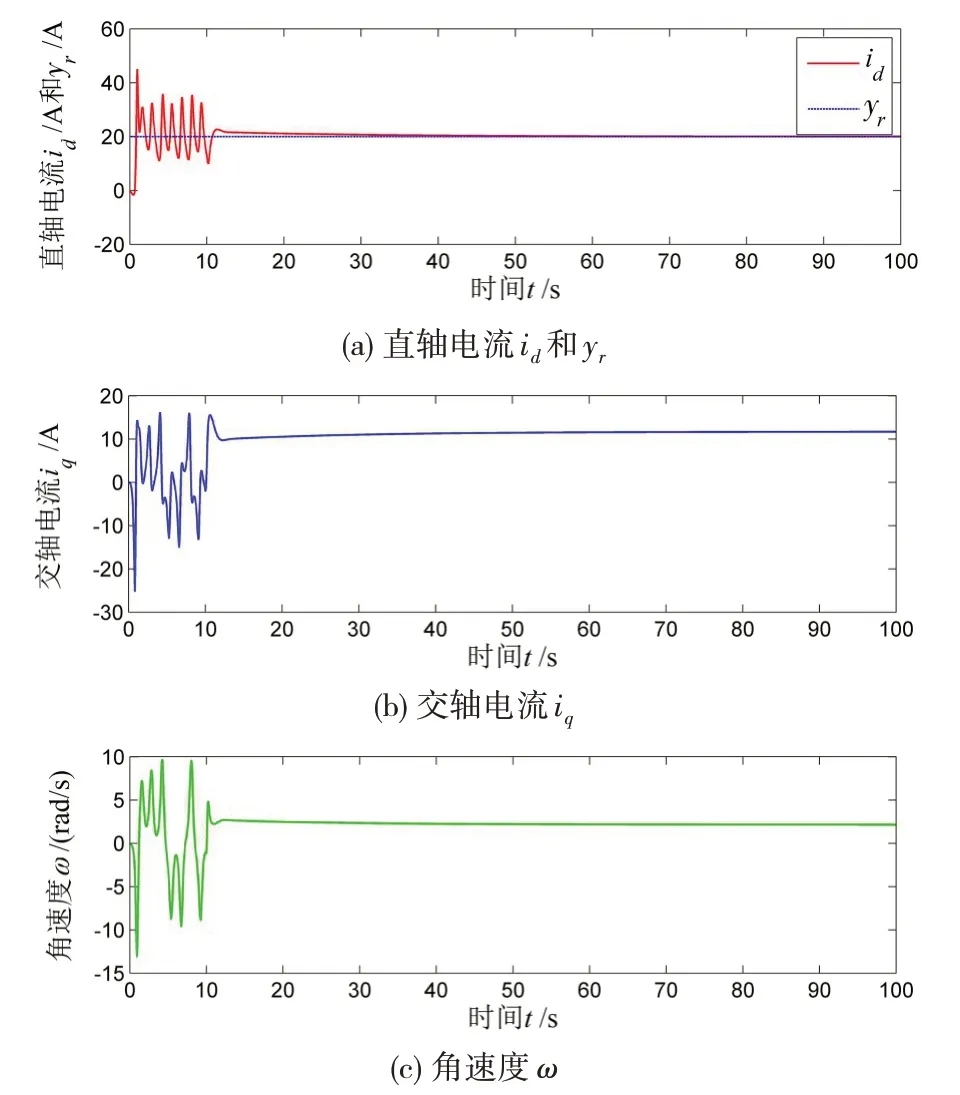
图4 PMSW 控制系统的状态变化

图5 PMSW 控制系统的输入信号
注1:在对永磁同步电机运动系统进行实际控制时,可以根据具体情况与性能指标要求,通过对控制器参数和滤波器参数等进行适当调整来实现。
注2:对于状态变量iq和ω,也可以利用本文方法实现设定值稳定调节。
本文对永磁同步电机混沌运动状态的控制问题进行了研究,提出了一种基于反步设计和动态面控制技术相结合的设计方法,设计的控制器结构简单、实现容易。数值仿真结果进一步验证了所提方法的有效性。
猜你喜欢 同步电机永磁子系统 不对中转子系统耦合动力学特性研究舰船科学技术(2022年21期)2022-12-12永磁同步电动机的节能计算上海大中型电机(2021年2期)2021-07-21突然短路与同步电机结构及电力系统的关系防爆电机(2021年2期)2021-06-09永磁同步电机两种高频信号注入法的比较防爆电机(2020年6期)2020-12-14GSM-R基站子系统同步方案研究铁道通信信号(2020年3期)2020-09-21驼峰测长设备在线监测子系统的设计与应用铁道通信信号(2018年8期)2018-11-10基于SVPWM的永磁直线同步电机直接推力控制系统组合机床与自动化加工技术(2014年12期)2014-03-01车载ATP子系统紧急制动限制速度计算铁路通信信号工程技术(2014年1期)2014-02-28简述永磁减速起动机汽车电器(2014年8期)2014-02-28 相关热词搜索:永磁,混沌,控制,





