模糊PID控制对电磁耦合调速器的转速控制研究
时间:2023-04-08 12:20:03 来源:千叶帆 本文已影响人
储江伟,谢鼎盛,刘 贺,刘梓敬,张泽涵
(1.东北林业大学, 哈尔滨 150040;
2.一汽大众, 吉林 130000)

1.1 电磁耦合调速器结构
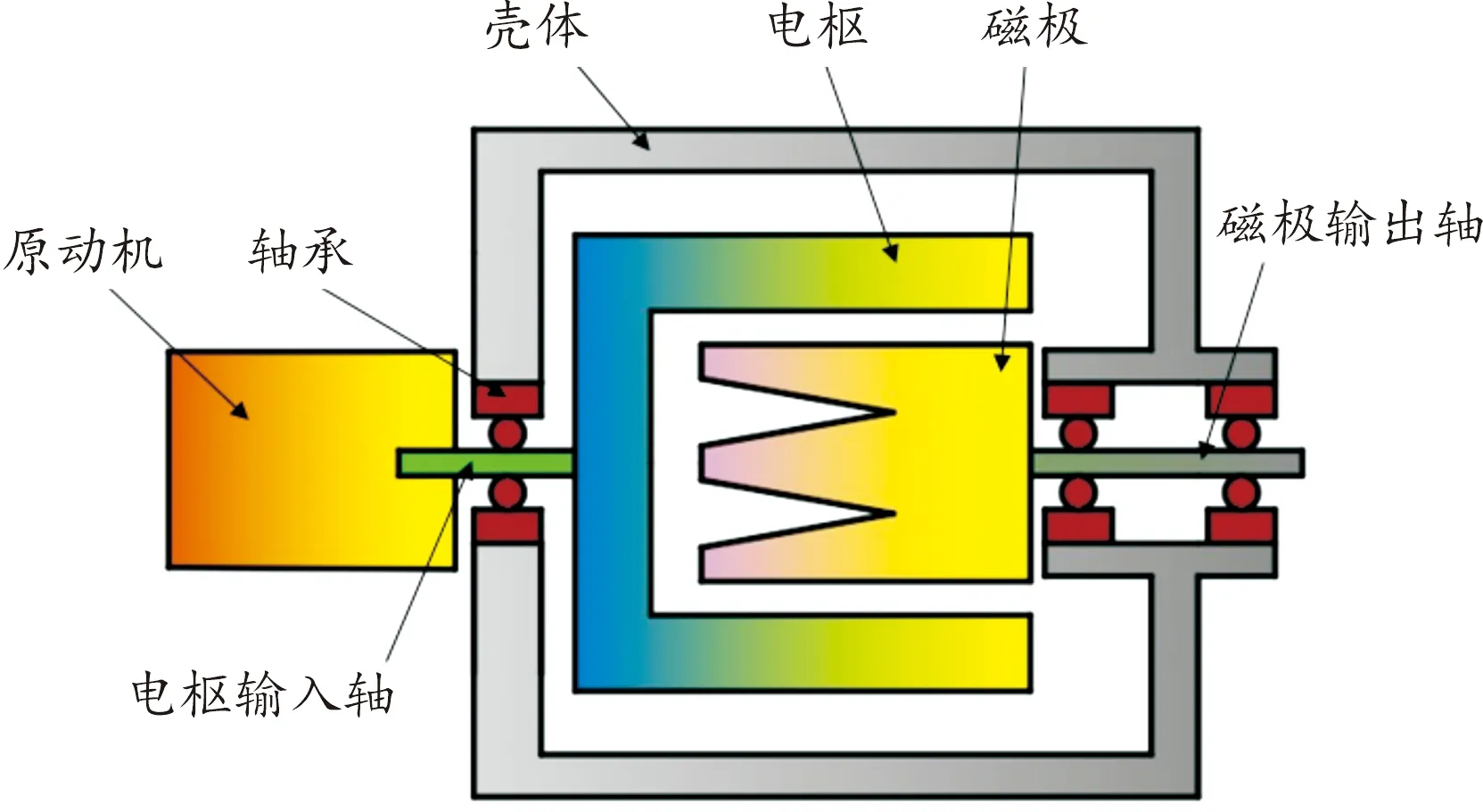
图1 电磁耦合调速器结构原理示意图
1.2 数学模型
电磁耦合调速器的电磁耦合部分的等效电路见图2。图2中,Ud为回路两端等效输入电压;
Lp为等效总电感;
Rp为等效总电阻;
Id为电路电流;
E为负载端电压;
M为负载。
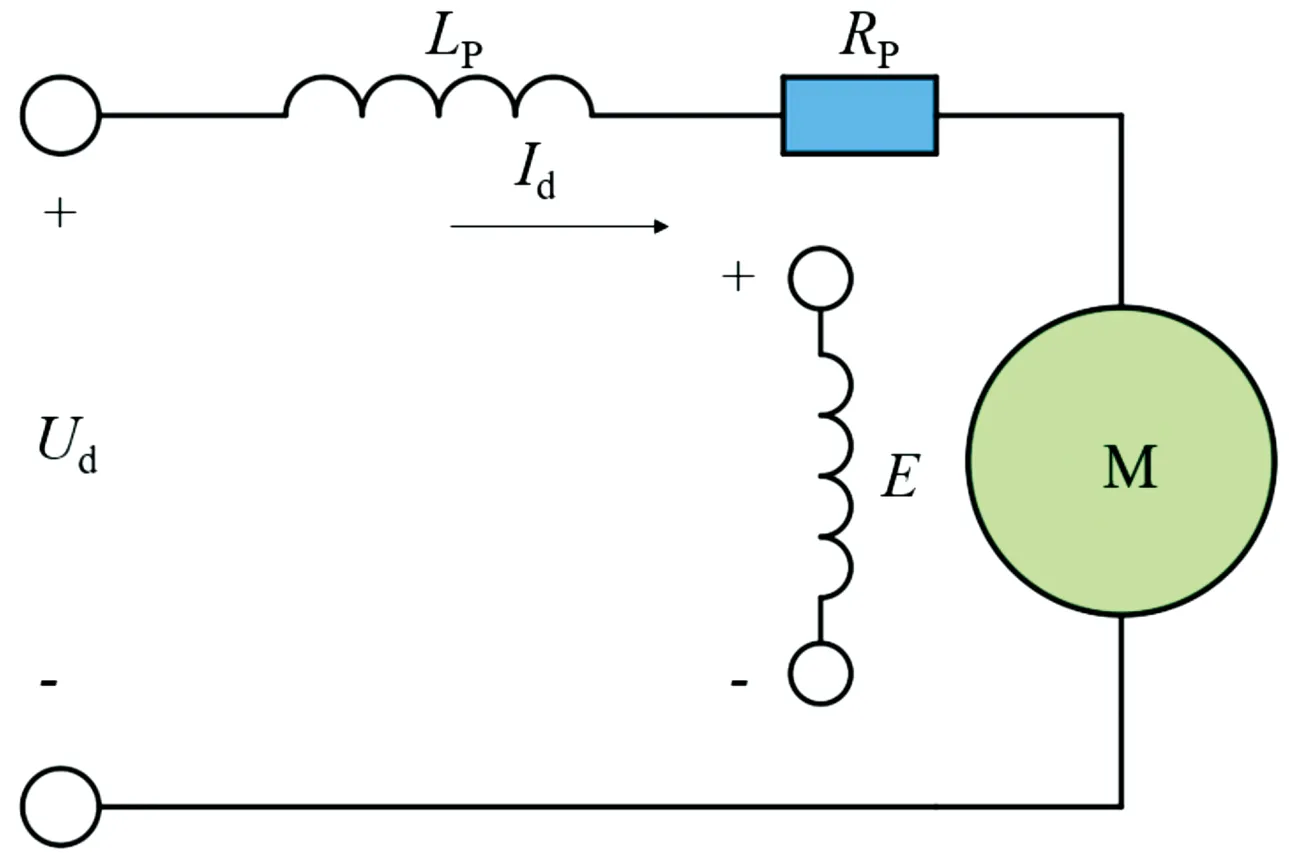
图2 负载模拟等效电路
等效电路各物理量存在如下关系:
(1)
在初始条件下对式(1)进行拉普拉斯变换,得到电压与电流的传递函数为:
(2)
负载电压E、电动势转速比Ce可表示为:
E=Cen
(3)

(4)
1.3 模型搭建
模型中的传递函数的含义与表达式见表1,模型传递函数中的变量含义和数值见表2。双闭环动态结构如图3所示。
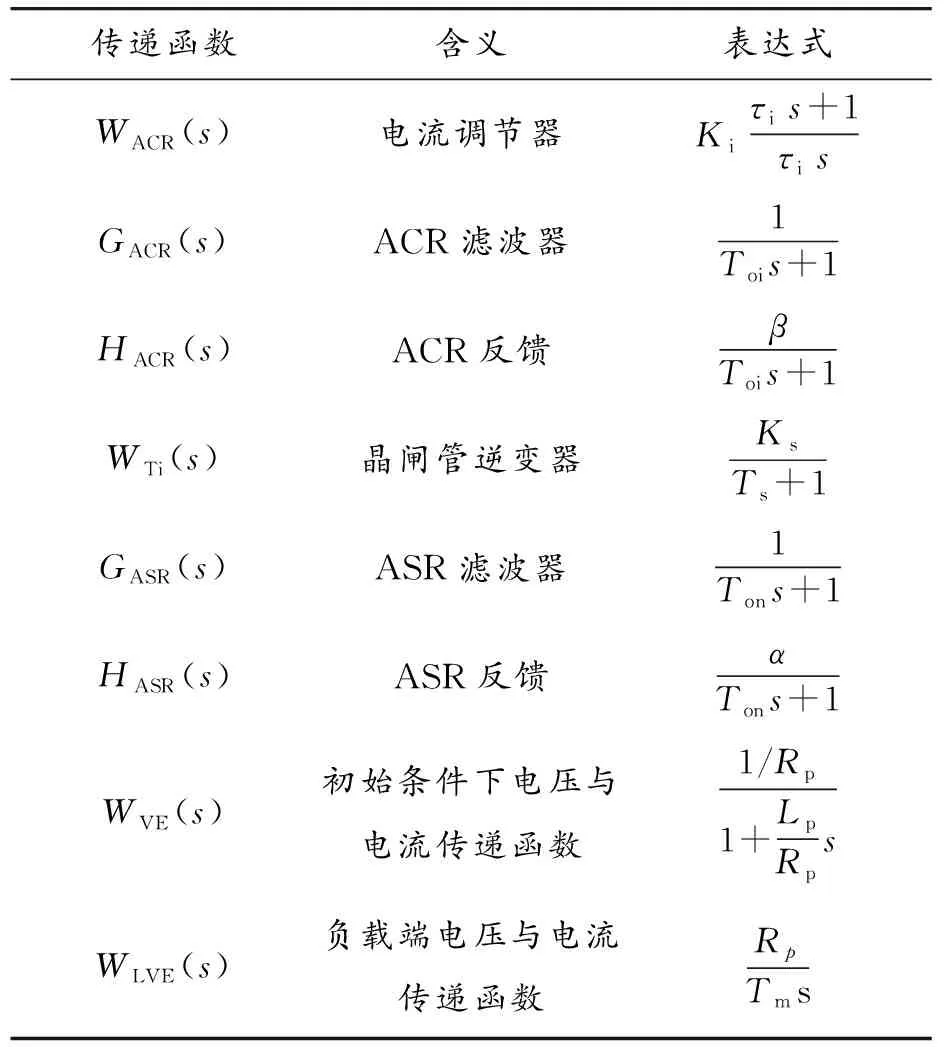
表1 模型中的传递函数的含义与表达式
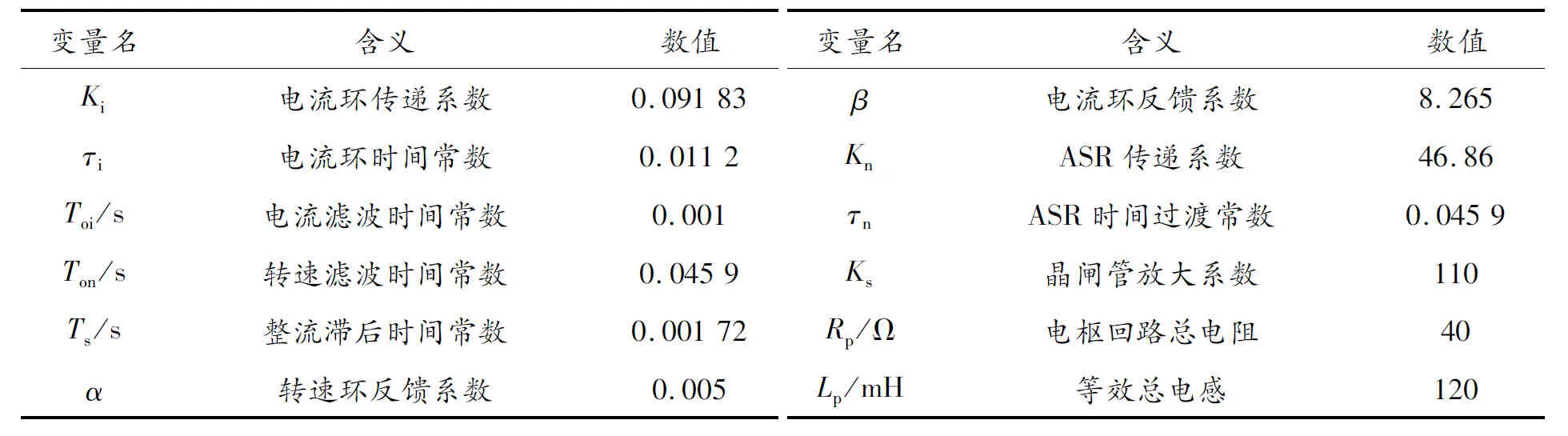
表2 传递函数中的变量含义与数值
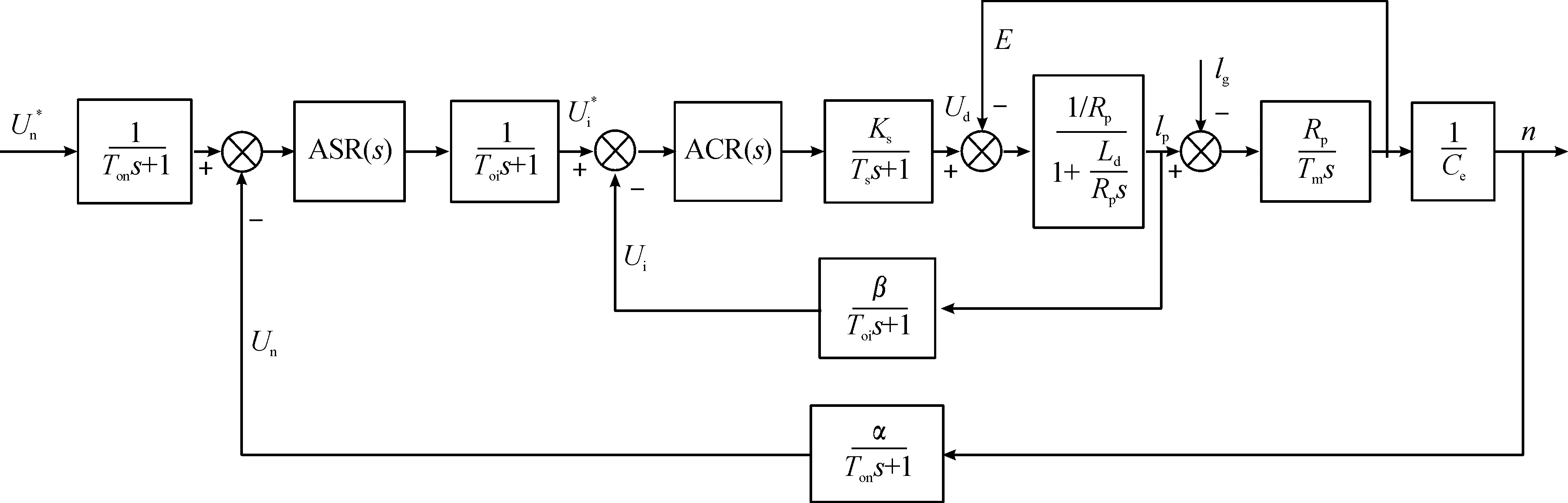
图3 双闭环动态结构简图
2.1 仿真条件
ASR采用模糊PID调节,输入量为目标转速与期望转速的误差e和误差变化率ec,输出为kp、ki、kd。输入与输出参数的论域与隶属函数类型见表3。模糊控制的模糊子集均为{XL,XM,XS,ZO,YS,YM,YL},模糊子集中的元素依次表示负大、负中、负小、零、正小、正中、正大,kp、ki、kd三个参数的模糊规则表见文献[11]。ASR控制模型见图4。

表3 模糊控制详情表

图4 转速环模糊PID控制模型示意图
2.2 仿真过程
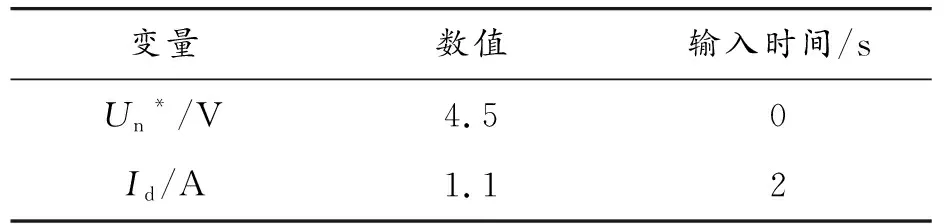
表4 控制模型的输入变量
2.3 仿真结果
图5为空载启动时的转速仿真曲线,图6为负载启动时的转速仿真曲线,图7为变负载时转速仿真曲线。变负载曲线的负载输入信号采用随机噪声输入,不断改变输入负载的大小,观察电磁耦合调速器的转速变化程度。
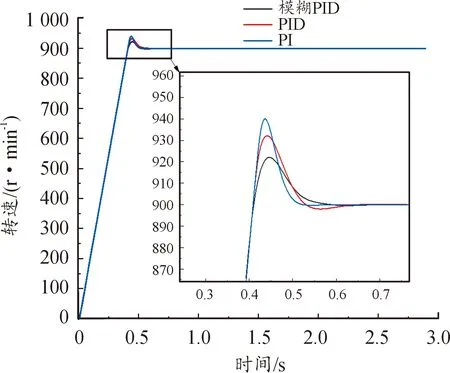
图5 空载启动时转速仿真曲线

图6 负载启动时转速仿真曲线

图7 变负载时转速仿真曲线
设定目标转速为900 r/min,测试中依此将模糊PID、PID、PI算法注入转速环,得到空载启动试验结果见表5。负载启动试验结果见表6。变负载转速仿真结果见表7。为了验证仿真结果的有效性,与文献[5]中双闭环仿真结果进行对比发现,其超调量相比文献[5]中减少了3.41%,达到目标转速的稳定时间减少了3.78 s,同一变负载下的最大扰动量减少了1.69%。文献[5]的双闭环控制效果见表8。
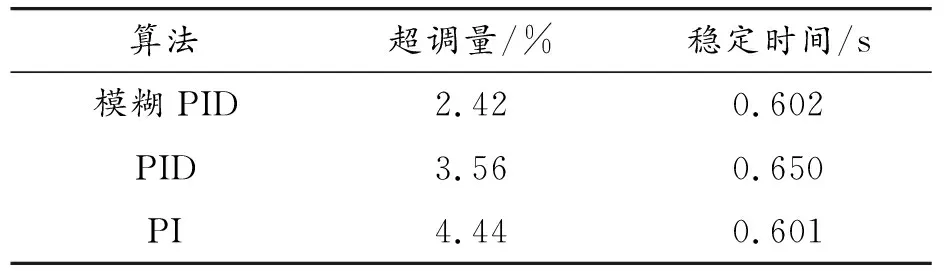
表5 模糊PID、PID和PI空载试验结果
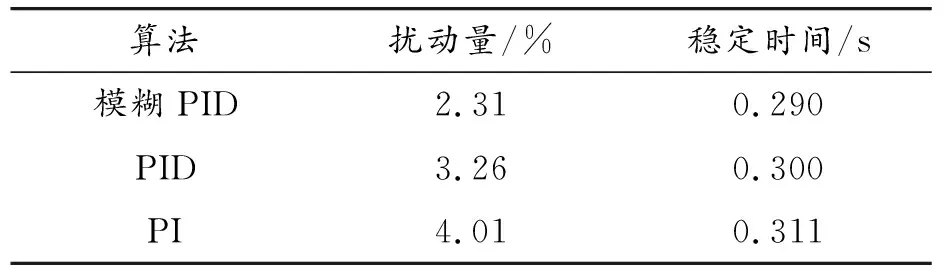
表6 模糊PID,PID与PI负载启动试验结果

表7 模糊PID,PID与PI变负载转速仿真结果

表8 文献[5]中双闭环控制效果
2.4 模糊PID控制的转速电流双闭环参数控制效果分析
根据上述结果分析可得,模糊PID、PID和PI算法均有良好的控制效果,但空载启动过程中,在稳定时间相差无几的情况下,模糊PID超调量更小(21.8 r/min),较PI控制时少18.18 r/min。在2 s加入负载后,模糊PID抗扰动能力更强,最低转速为20.79 r/min。相比PI算法减少15.3 r/min,稳定性更优异。
基于型号为STM32F407IGT6的单片机,将PID算法与模糊PID算法编写代码后烧入单片机中进行控制,试验原理见图8[16]。

图8 STM32单片机控制试验原理示意图
试验对象为电磁耦合调速器,电磁耦合调速器的相关参数见表9,试验台实物图见图9。试验中根据实际情况设定统一目标转速与幅度设定值,电机最大转速为750 r/min,750幅度值对应的转速即试验目标转速。
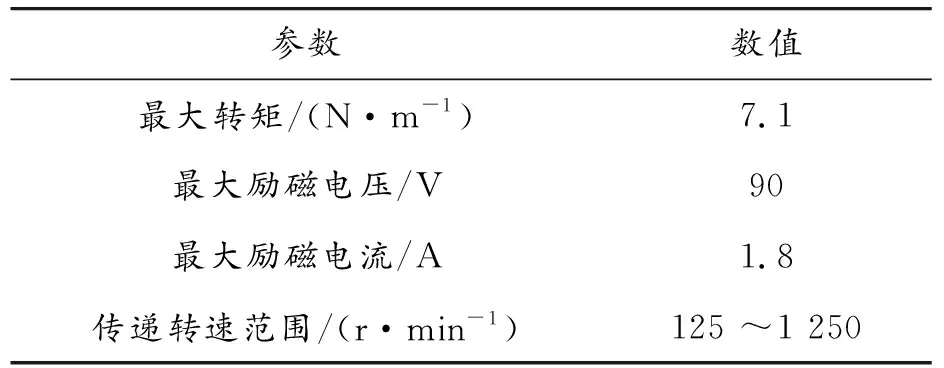
表9 电磁耦合调速器参数
图9中变频器的作用是调节电机输入电流与接收控制板的指令,提高励磁电流的大小。直流电源为控制板提供3.3 V的直流电。编码器将转速信号编译并传递给控制板,再通过烧入单片机中的程序算法进行反馈控制,实现对电磁耦合调速器的控制,并将结果在电脑上显示。试验结果见图10和图11,试验效果分析见表10。
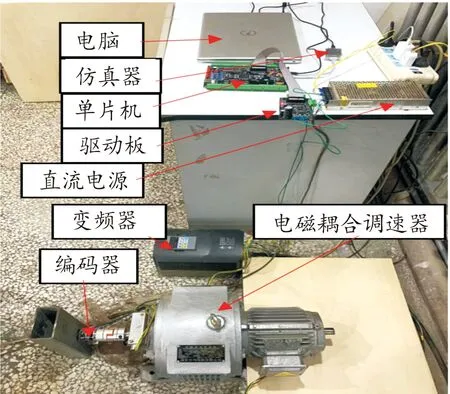
图9 电磁耦合调速器控制试验台实物图

图10 PID控制试验结果
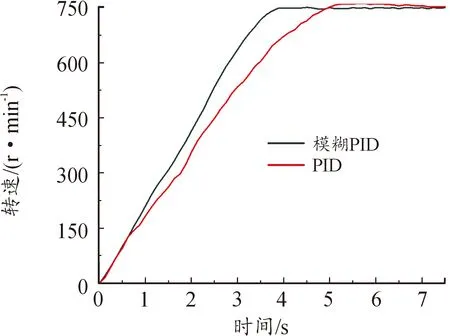
图11 模糊PID控制试验结果
通过试验结果可得,模糊PID的超调效果优于PID,但由于电磁耦合调速器磁极部分具有一定惯性,导致启动时间较长。
4.1 PSO优化设计原理
PSO优化模糊PID原理见图12。r(k)为系统输入量,u(k)为系统输出量,e(k)为系统偏差量,Fkpn,Fkin,Fkdn为PSO的输出参数。
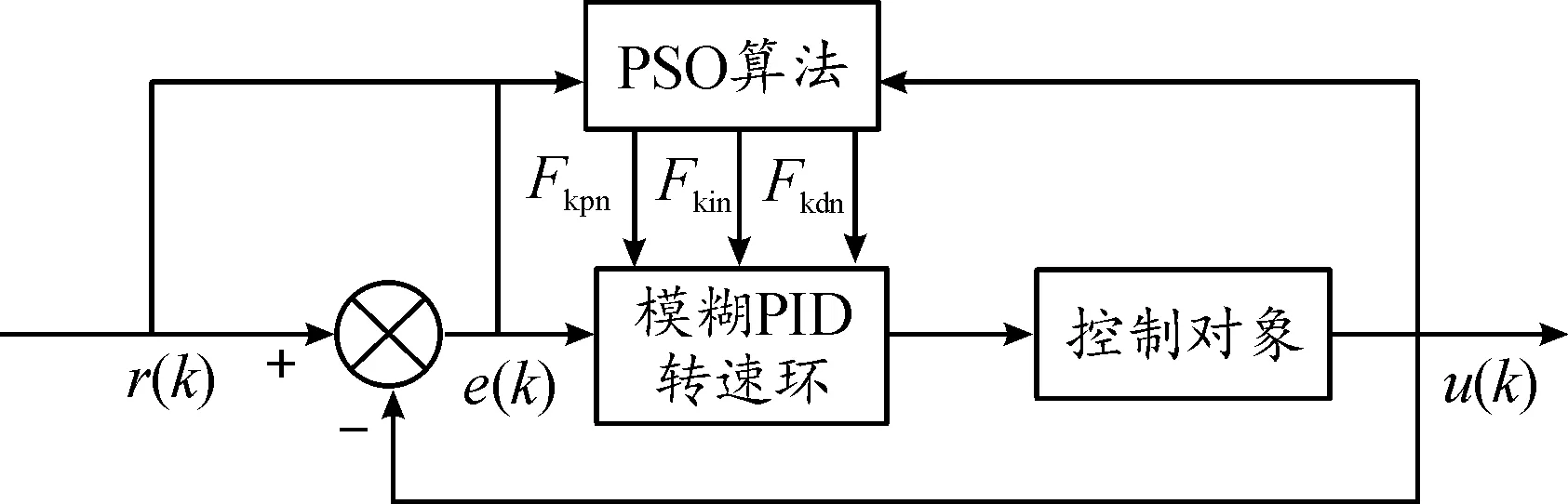
图12 PSO优化模糊PID原理示意图
PSO算法优化运行过程中会根据ITAE计算各粒子的适应值,找到最优的一组Fkpn、Fkin和Fkdn,系统采用这一组的控制参数再运行一次得到更优的一组控制参数并更新,如此反复,直到输出信号满足目标函数的精度要求,停止迭代。此时输出的一组控制参数即最优控制参数组。
4.2 PSO优化设计流程
PSO算法的设计流程如下[19-20]:
步骤1初始化粒子群。确定种群M,优化变量(优化变量子集A={Fkpn,Fkin,Fkdn}),对应初始位置限制,并确定粒子初始速度,惯性因子与加速权重等;
步骤2评价各粒子初始适应值,适应值由目标函数ITAE(时间与绝对误差乘积的积分)确定,ITAE见式(5);
步骤3将步骤2中的初始适应值作为各粒子局部最优解,不断更新各粒子最优位置,直到求得全局最优解;
步骤4更新粒子局部最优解与全局最优解;
步骤5将求得的最优解代入目标函数;
步骤6不断迭代最优解,直到目标函数收敛,得到最终的优化后的参数。
4.3 优化结果分析
4.3.1构造目标函数
针对转速的超调量与稳定时间进行优化,选用ITAE为目标函数,具有瞬态响应震荡小的特点。其表达式为:

(5)
式中:t为仿真时间(s);e(t)为信号偏差量。
4.3.2全局寻优
采用PSO算法进行全局寻优,PSO算法优化迭代过程曲线见图13。

图13 PSO算法迭代过程曲线
根据图13可以看出,PSO优化算法在运行第10次时,式(5)开始收敛,取得最小值,Fkpn、Fkpn和Fkpn取得最优解。
为了检验算法优化的有效性,得到空载启动与负载启动时的仿真转速曲线,见图14和图15,变负载启动转速仿真曲线见图16。
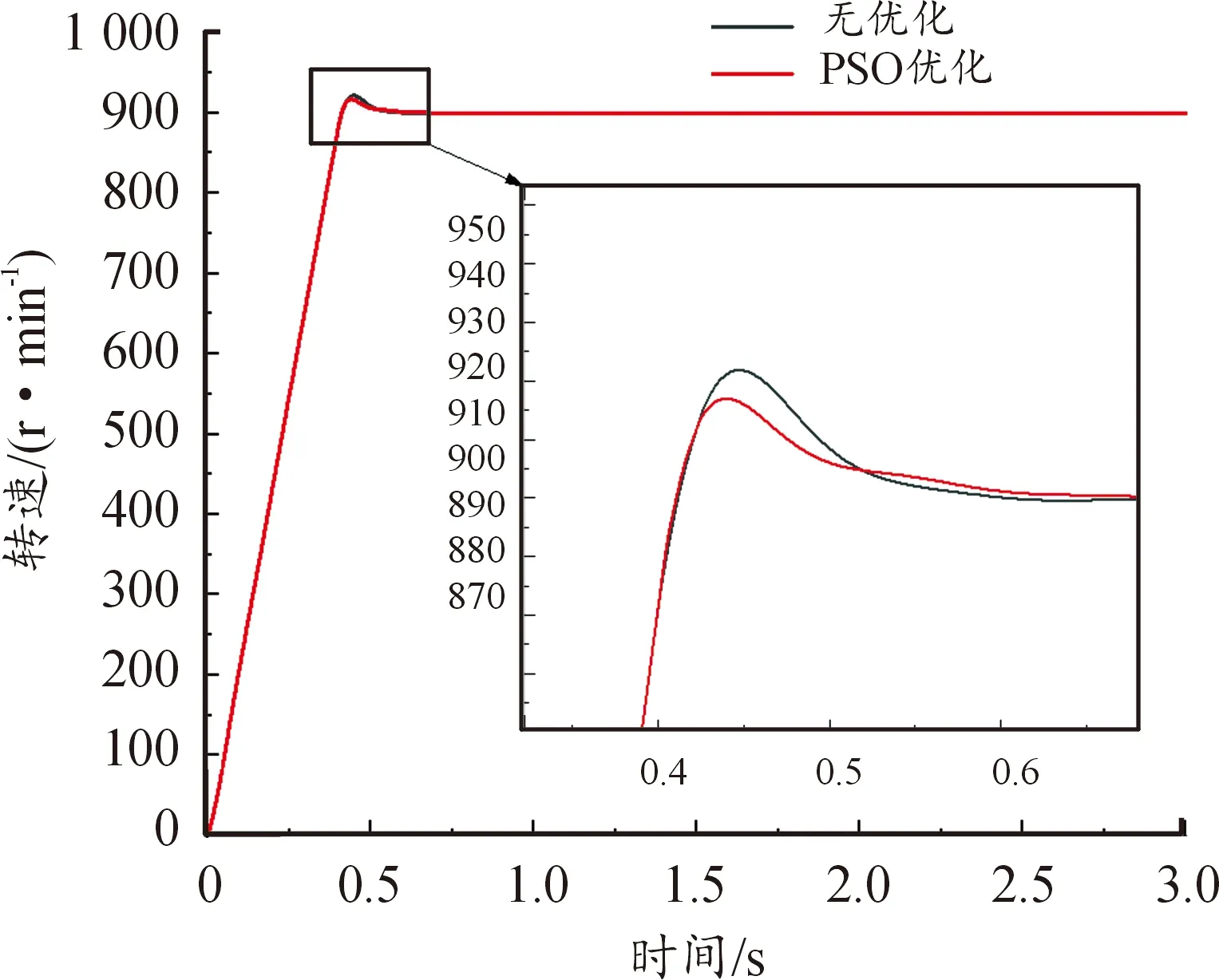
图14 PSO优化空载启动转速仿真曲线

图15 PSO优化负载启动转速仿真曲线

图16 变负载时转速仿真曲线
模糊PID参数优化前后值见表11,空载启动优化测试数值分析结果见表12,负载启动优化测试数值分析结果见表13,变负载启动优化数值见表14。
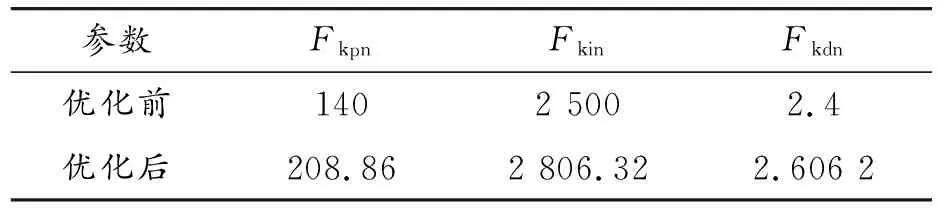
表11 模糊PID参数优化前后值

表12 空载启动优化数值分析结果

表13 负载启动优化数值分析结果

表14 变负载启动优化数值
分析表12与表13发现,PSO优化的模糊PID控制的超调量相比无优化时降低5.13 r/min,稳定时间缩短了0.01 s,扰动量相比无PSO优化的情况下减少了4.5 r/min,稳定时间缩短了0.08 s。分析表14发现,PSO优化的情况下,最大扰动转速相比无PSO优化时减小7.8 r/min,具有一定优化效果,提高了模型的转速控制性能与鲁棒性。
1) PSO优化的模糊PID算法对双闭环的控制效果优于传统PID与PI算法。优化后得到的转速相比PI算法超调量减少了23.31 r/min,扰动量减少了19.8 r/min,稳定时间缩短了0.101 s。
下一步工作中,将针对模糊PID算法的双闭环控制电磁耦合调速器的转速输出试验加入负载进行深度分析,由于PID存在加入负载后转速恢复缓慢的情况,可将模糊PID取代PID算法在负载启动情况下进行试验。
猜你喜欢调速器电磁启动瞬变电磁法在煤矿采空区探测中的应用资源信息与工程(2021年5期)2022-01-15三维多孔电磁复合支架构建与理化表征中国生物医学工程学报(2019年4期)2019-07-16电力系统水机调速器改造情况及特点研究消费导刊(2017年24期)2018-01-31雾霾来袭 限产再次启动中国化肥信息(2018年3期)2018-01-30掌握基础知识 不惧电磁偏转中学生数理化(高中版.高二数学)(2017年1期)2017-04-16安发生物启动2017知识经济·中国直销(2017年3期)2017-04-16水电站冲击式水轮机调速器技术发展回顾山东工业技术(2016年15期)2016-12-01响水水电站调速器技改研究魅力中国(2016年7期)2016-05-14数字直流调速器6RA70在纺丝牵伸系统中的应用合成技术及应用(2015年3期)2015-12-11双线圈电磁系统电磁吸力仿真计算智能建筑电气技术(2015年5期)2015-12-10 相关热词搜索:调速器,控制,耦合,





