基于单电流调节器的永磁同步电机深度弱磁控制及模式切换控制策略*
时间:2023-04-20 09:05:09 来源:千叶帆 本文已影响人
王国栋,王丽芳,吴 艳,张俊智
(1.中国科学院电工研究所,北京 100190;
2.中国科学院大学,北京 100049;
3.清华大学车辆与运载学院,北京 100084)
永磁同步电机(permanent magnet synchronous motor,PMSM)具有结构简单、运行可靠、功率密度高、效率高、外型和尺寸可以灵活多变等显著特点,使其广泛应用于工农业生产、航空航天、国防和日常生活中。现今,永磁同步电机已广泛应用于智能电动汽车的不同子系统中,如驱动系统中的轮毂电机、电子机械制动系统中的制动电机和助力转向系统中的助力电机等。
在实际工程应用中,由于对电机转矩规格的高要求,使电机额定转速降低,难以满足宽转速范围的工程要求。当电机端电压达到驱动器输出最大电压时,其运行速度无法继续上升。为进一步提高转速,必须进行弱磁控制。传统的永磁同步电机弱磁控制算法基于磁场定向,通常由两个电流调节器分别控制直轴电流id和交轴电流iq。常见的方法有公式计算法[1]、查表法[2]、负直轴电流补偿法[3]、电压反馈法[4-5]等。这类基于两电流调节器的弱磁控制方法,当电机进入弱磁控制时,随着转速ωe升高,交直轴电压中的ωe相关项幅值变大,两个电流调节器交叉耦合加重,电流调节器易于饱和,无法同时满足dq轴两个电流调节器的调节需求,甚至造成不稳定。
因此,为解决这一问题,单电流调节器(single current regulator,SCR)作为一种具有天然“解耦特性”和深度弱磁能力的永磁同步电机弱磁控制方法逐渐被提出并发展。文献[6]中提出了一种只保留直轴电流调节器、去掉交轴电流调节器的控制策略,这种控制策略结构简单,但须给定一个合适的交轴电压指令,导致电压利用率和系统效率低。因此,学者们又逐渐研究提出了虚拟阻抗变交轴电压d轴单电流调节器[7-8]、查表法变交轴电压d轴单电流调节器[9]、电压极限圆变交轴电压d轴单电流调节器[10-11]和变直轴电压q轴单电流调节器[12-13]。文献[7]和文献[8]中在保留一个直轴电流调节器的基础上,通过引入虚拟阻抗来提高系统带载能力,降低系统损耗,但需要依赖于电机参数进行计算,当电机参数发生变化时系统控制性能会受到影响。文献[9]中只保留了一个直轴电流调节器,交轴给定电压通过查表法得出,虽然这种控制策略不依赖于电机参数,但须进行大量的实验采集工作,且程序可移植性差。文献[10]~文献[13]中分别只保留了一个直轴电流调节器或交轴电流调节器,系统可以在同一控制结构下实现电动与发电,但两种控制策略结构复杂,且求取电流指令时也需要依赖电机参数。以上单电流调节器控制算法各有优缺点,将其优缺点汇总如表1所示。

表1 单电流调节器控制算法对比
针对以上控制策略存在的不足,提出一种基于电压相角的改进型单电流调节器深度弱磁控制方法及模式切换控制策略。该方法具有动态性能优异、不依赖电机参数、结构简单和电压利用率高等众多优点,能够满足永磁同步电机控制系统强非线性、参数变化以及对电机系统高速和宽调速范围的要求。模式切换控制策略可以保证永磁同步电机在弱磁区实现电动与发电的平滑切换,使系统便于被实际工程应用。
PMSM 在转子同步旋转坐标系下的稳态数学模型为
式中:ud、uq为PMSM 定子直轴、交轴电压;
id、iq为PMSM 定子直轴、交轴电流;
Ld、Lq为PMSM 定子直轴、交轴电感;
ωe为电角速度;
φf为永磁体磁链;
Te为电磁转矩;
p为电机极对数。
当电机进入弱磁区后,逆变器输出电压饱和,达到最大值umax,电机电压受式(3)限制,电机电流受式(4)限制:
式中:us为电压矢量幅值;
is为电流矢量幅值。
随着电机转速的升高,dq轴之间高速交叉耦合更加严重,动态性能无法同时满足两个电流调节器的调节需求,此时可自由调节的控制变量只有电压相角β,通过单电流调节器调节电压相角可以解决永磁同步电机高速弱磁的失控问题,实现稳定的深度弱磁控制,解决高速交叉耦合问题。
电压相角β的定义如图1 所示,电压相角β是dq轴电压平面上电压矢量us与d轴的夹角,此时交直轴电压满足:

图1 电压相角定义
因此,进入弱磁区后,在单电流调节器调节下电机电压满足:
因此,当电机运行于恒转矩区时,即电机转速小于基速时,系统采用以双电流调节器为核心的最大转矩电流比控制(maximum torque per ampere,MTPA)。
永磁同步电机进入弱磁区后,受式(5)的约束,电压相角β是唯一可自由调节的控制变量。因此,为改善电机动态性能,实现电机深度弱磁控制,系统电流环只保留一个电流调节器用于调节电压相角β。在永磁同步电机矢量控制系统中,电流调节器既可以是d轴单电流调节器(D axis single current regulator,SCR_D),也可以是q轴单电流调节器(Q axis single current regulator,SCR_Q)。
2.1 单电流调节器稳定运行范围
以d轴单电流调节器为例,系统模型如图3 所示。对系统进行小信号模型分析,然后根据劳斯判据得出d轴单电流调节器的电压相角的稳定运行范围为

图3 d轴单电流调节器系统模型
因此,将d轴单电流调节器的稳定运行范围映射到图2后,由图2 可知,此时iq为正,电磁转矩为正,则该区域是电机电动运行的稳定区域。
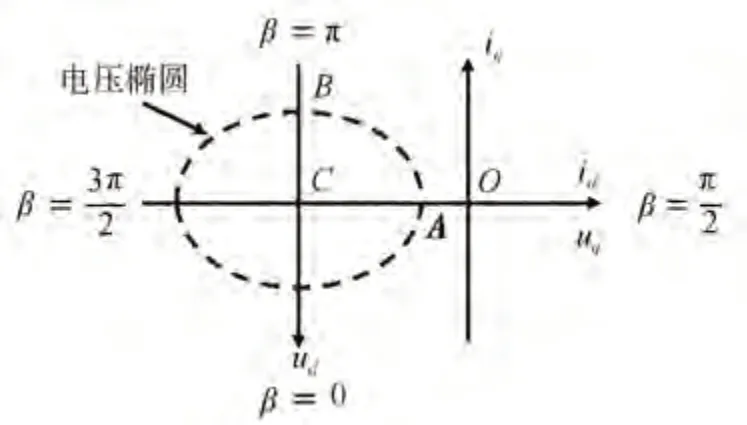
图2 电压圆映射到电流平面
同理对q轴单电流调节器系统模型进行小信号模型分析,根据劳斯判据得出系统稳定运行范围为,将该稳定运行范围映射到图2后可以看出,电流工作点的稳定运行范围内iq为负,电磁转矩为负,则该区域是电机发电运行的范围。
因此,d轴单电流调节器(SCR_D)和q轴单电流调节器(SCR_Q)的稳定运行区域如图4所示。
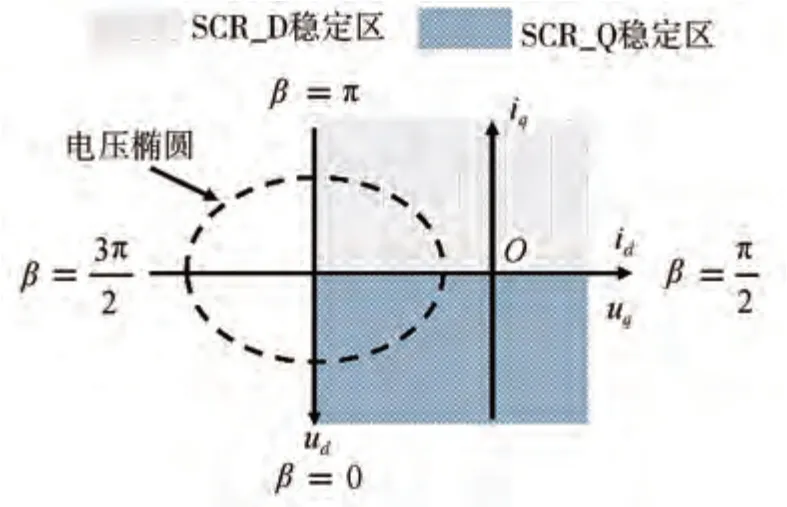
图4 单电流调节器稳定运行区域
2.2 弱磁控制策略
基于以上分析,分别设计电机电动运行的d轴单电流调节器控制框图和电机发电运行的q轴单电流调节器控制框图。电机电动运行时,根据系统控制需求不同,分别设计电流工作点沿电流圆运行的d轴单电流调节器控制框图和电流工作点沿等转矩曲线运行的d轴单电流调节器控制框图,其中等转矩曲线d轴单电流调节器使控制系统集成了转矩标定功能,适用于转矩给定控制模式,不适用于空载或负载较小的系统运行。电流圆d轴单电流调节器则适用于所有控制需求,本文中以电流圆d轴单电流调节器为主要研究对象。
电流圆d轴单电流调节器控制框图如图5所示。电机进入弱磁区后,电流工作点沿电流圆运行,根据电流圆、电流指令和交轴电流iq获得直轴电流指令,进而调整电压相角,分配交直轴电压。
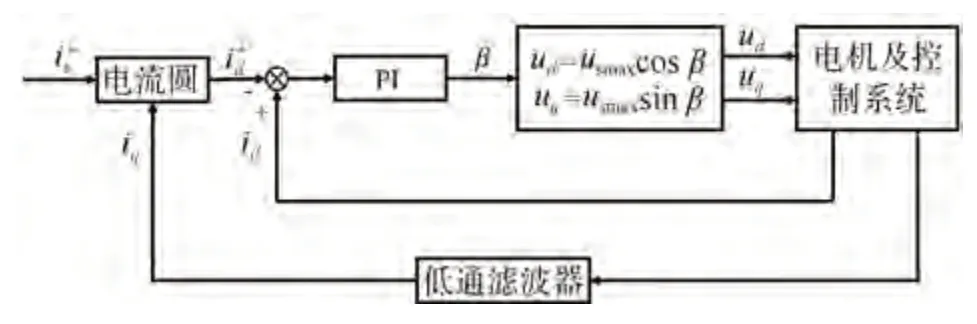
图5 电动运行时电流圆d轴单电流调节器控制框图
等转矩曲线d轴单电流调节器控制框图如图6所示。与电流圆d轴单电流调节器的区别是电机进入弱磁区后,电流工作点沿等转矩曲线运行,根据等转矩曲线、电流指令和交轴电流iq获得直轴电流指令,进而调整电压相角,分配交直轴电压,从而实现弱磁区等转矩控制,同时为防止电机输出功率超过电机峰值功率,须设置转矩限幅模块。
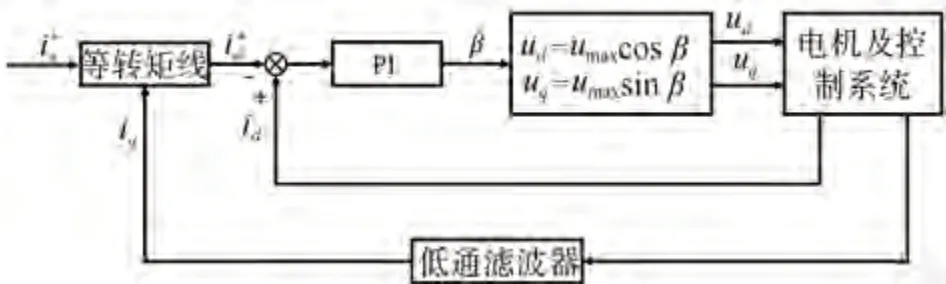
图6 电动运行时等转矩d轴单电流调节器控制框图
电机发电运行的q轴单电流调节器控制框图如图7 所示。与电动运行时d轴单电流调节器的区别是电机进入弱磁区后,若电流工作点沿电流圆弱磁则可能使系统进入功率陷阱,因此为避免系统失控,交轴电流指令以电流圆作为限幅值。

图7 发电运行时q轴单电流调节器控制框图
2.3 模式切换控制策略
永磁同步电机全速域全工况下运行须设计控制模式切换控制策略,控制模式切换包括:弱磁区与恒转矩区切换,即双电流调节器与单电流调节器切换;
电动工况与发电工况切换,即不同单电流调节器控制结构切换。单电流调节器控制模式切换问题是制约单电流调节器实际应用的一个关键问题,控制模式切换时对电流轨迹的规划和对电流尖峰、转矩脉动的抑制关系到电机的平稳运行。
2.3.1 弱磁区与恒转矩区控制模式切换
永磁同步电机全速域控制是采用基速以下的MTPA 控制和基速以上的弱磁控制分段进行,在双电流调节器与单电流调节器进行模式切换时,需要对电流尖峰和转矩脉动进行抑制,否则电机会产生较大的转矩脉动或过流故障,甚至导致系统进入不稳定状态。
现有文献[6-8,14]大多采用单一条件判断的控制模式切换策略,进入弱磁控制模式时采用电压指令幅值与逆变器最大输出电压比较判断的方式,当电压指令幅值大于等于逆变器最大输出电压时,进入弱磁控制模式。退出弱磁控制模式时采用直轴电流实际值与MTPA 控制下相应的直轴电流指令值比较判断的方式,即实际电流工作点与MTPA 曲线的位置关系,当实际电流工作点位于MTPA 曲线右侧时,退出弱磁控制模式。
但是,弱磁前后由于谐波、交叉耦合等因素的影响,id、iq在指令附近波动较大,单一条件判断的控制模式切换策略必然易于触发控制模式错误切换,进而产生转矩脉动和电流尖峰。
针对上述切换控制策略存在的不足,设计新的控制模式切换控制策略。首先设计两个切换条件,切换条件是进行控制模式切换的必要条件,而非充要条件。
切换条件如下。
①电压饱和判断条件:
②电流工作点位置判断条件:
带滞环处理的id<-abs(iq)tanθM
之后设计控制模式切换控制策略,控制模式切换控制策略如图8 所示。当电压饱和判断条件和电流工作点位置判断条件同时满足时,系统采用单电流调节器弱磁控制策略;
当两条件都不满足时,系统采用双电流调节器的MTPA 控制策略;
其他情况下,系统保持原有控制模式不变。同时,为抑制电流尖峰和转矩脉动,在控制模式切换瞬间,使电压相角β保持不变。
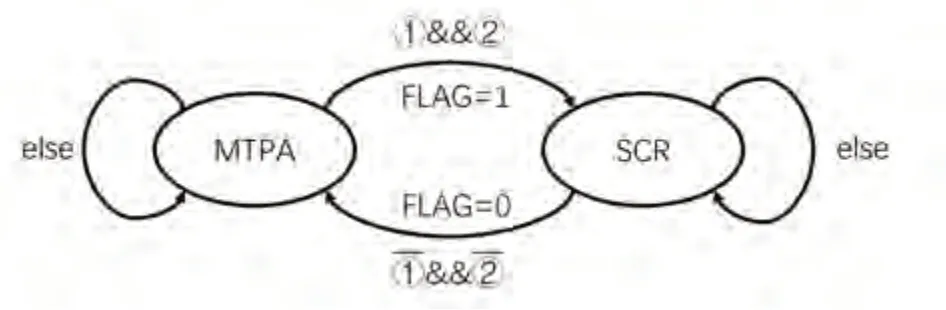
图8 弱磁区与恒转矩区控制模式切换策略
2.3.2 电动工况与发电工况控制模式切换
在电动和发电工况下,永磁同步电机进入深度弱磁区后,系统耦合严重,稳定性差,电机反电势大,远高于电源(电池)电压,若电机失控,系统电压安全问题突出。
因此,电机进入弱磁区后,电机电动运行时采用d轴单电流调节器实现,电机发电运行时采用q轴单电流调节器实现,同时须设计跨稳定工作区跨象限的控制模式切换策略,解决控制模式切换时电压安全问题。
由式(1)可知,反电势项ωeφf是交轴电压的主要部分,控制模式切换瞬间为防止因大反电势造成电压安全问题,切换时须保持交轴电压相等。因此,当电机由电动切换到发电时,即由d轴单电流调节器切换到q轴单电流调节器,如图9所示。根据控制需求的不同,电流工作点可以由x点切换到直线yz上的任意一点,从而保证切换前后交轴电压相等。

图9 不同电流工作点切换
同理,当电机由发电切换到电动时,即由q轴单电流调节器切换到d轴单电流调节器,根据控制需求的不同,电流工作点可以由y点切换到直线xz上的任意一点,从而保证切换前后交轴电压相等。
为提高弱磁区输出功率,采用等功率控制模式切换策略。电机功率与电机转速和电磁转矩的乘积成正比,在模式切换瞬间,由于电机是惯性环节,电机转速不变,因此实现等功率控制模式切换策略须保持电磁转矩Te幅值不变,改变电磁转矩Te的符号,即在电流工作点x与电流工作点y之间直接阶跃,如图9 所示。从电压相角来看,在切换的瞬间,电压相角由β切换到π -β。
因此,在弱磁区与恒转矩区控制模式切换策略和电动工况与发电工况控制模式切换策略共同作用下,永磁同步电机可以实现如图10 所示的全工作范围内高动态性能、高稳态性能的电动控制和发电控制。
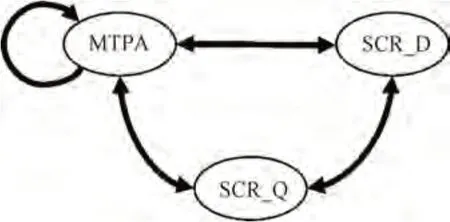
图10 电机驱动系统全工作范围控制策略
搭建永磁同步电机实验和仿真平台,电机参数如表2 所示。鉴于直流母线电压330 V 时电机峰值转速的限制,只能实现2 倍弱磁控制,为验证单电流调节器的深度弱磁能力,实验和仿真均在50 V 直流母线电压下进行,实验和仿真电机采用转速控制。

表2 PMSM 参数
在Matlab/Simulink 中搭建与实验电机参数一致的仿真模型。仿真模型包括MTPA 控制策略模块、SCR 控制策略模块、切换条件①判断模块、切换条件②判断模块和标志位判断模块。标志位判断模块按照图8 的控制策略生成标志位FLAG,当FLAG 为0时,系统采用MTPA 控制策略,同时计算电压角度β;
当FLAG 为1时,系统采用SCR 控制策略,同时计算ud、uq,当控制策略切换时,同步更新电流调节器的积分变量。
对系统进行电机深度弱磁仿真,由表2 的电机参数推算可知,在直流母线电压为50 V 的条件下,电机的基速为950 r/min。仿真中转速指令以斜坡形式递增到6 000 r/min,从而实现6.3倍弱磁控制。电机转速speed、电压角度β和交直轴电流id、iq如图11所示,直轴电流id的指令跟踪情况和交直轴电压指令ud、uq如图12所示,电流轨迹如图13所示,电压轨迹如图14所示。

图11 转速、电压相角和电流仿真结果

图12 电流指令跟踪情况与电压指令
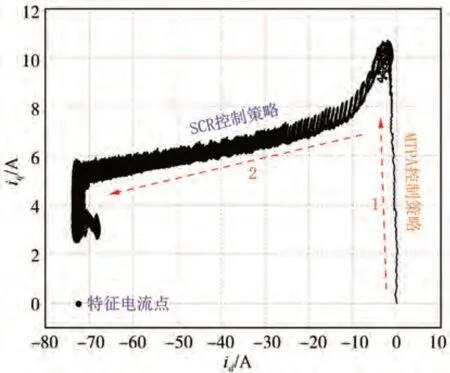
图13 电流轨迹图
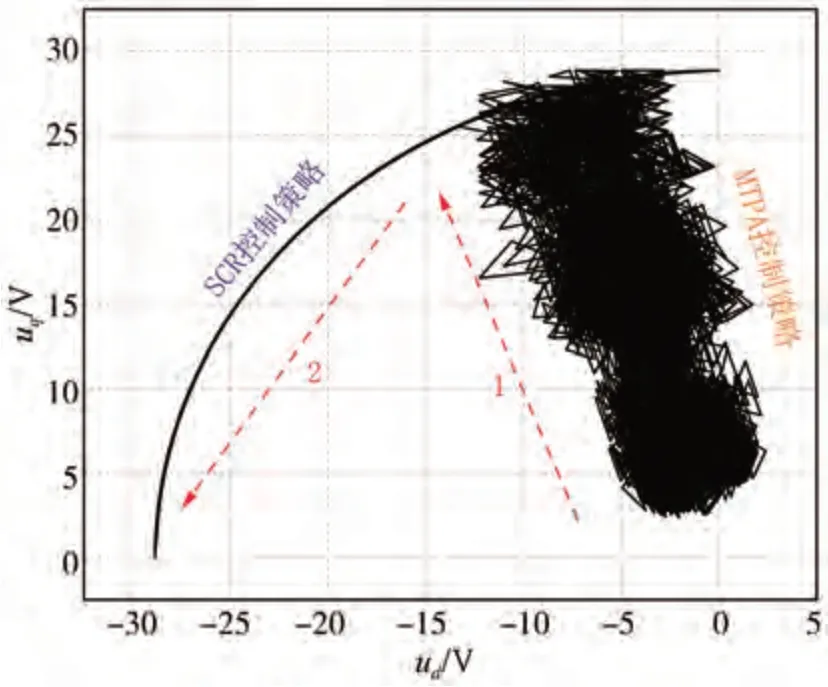
图14 电压轨迹图
由图11 可知,随着电机转速的升高,在0.14 s时弱磁标志位FLAG 由0 置1,电机由恒转矩区进入恒功率区运行,大约在2 s处,电机转速稳定运行在6 000 r/min,实现6.3 倍深度弱磁控制。随着电机转速升高,电机在进入弱磁区后,在单电流调节器的调节下,电压相角β不断增大,电机转速稳定后,电压相角稳定在2.85 rad 附近。在此过程中,随着电机由恒转矩区进入恒功率区,交轴电流iq先增后减,最后稳定在3.5 A左右,直轴电流id的幅值一直沿负向增大。同时可以看出,在弱磁标志位FLAG 由0 变1的瞬间,即控制策略切换的瞬间,电机转速、电压相角和电流都较为平滑地实现了切换,没有出现电流尖峰和转速波动。
从图12 中可以看出,在恒转矩区(FLAG=0 时)直轴电流id稳定地跟踪MTPA 策略下的电流指令,当电机进入弱磁区(FLAG=1 时)后,系统切换到SCR控制策略,直轴电流id仍稳定跟踪电流指令。在恒转矩区(FLAG=0时),交直轴电压指令ud、uq在MTPA策略控制下幅值不断增大,在0.14 s 时完成MTPA到SCR 的控制策略切换且交直轴电压指令ud、uq平滑过渡,0.14 s 后进入弱磁区(FLAG=1 时),此时逆变器达到最大输出电压umax,在SCR策略控制下通过调节电压相角β重新分配交直轴电压指令ud、uq,电压利用率高,直轴电压指令ud在SCR 策略控制下幅值继续增大直至稳定,交轴电压指令uq在SCR 策略控制下幅值开始减小直至稳定。
图13 清晰反映了系统在MTPA 和SCR 控制策略下电流工作点的轨迹路线。随着电机转速升高,电流工作点在MTPA 控制策略下由0 点沿MTPA 曲线向左上方向移动(如图中箭头1 所示),电机到达基速后,系统在SCR 控制策略下电流工作点沿电流圆与电压椭圆的交点向左下方向移动,不断靠近特征电流点(如图中箭头2 所示)。由于仿真过程中电机是一个恒加速度过程,根据电机运动方程,在忽略摩擦的情况下,此时电磁转矩Te恒定,因此电机在进入弱磁区后电流工作点实际上是沿着等转矩曲线移动的,这也侧面验证了等转矩曲线d轴单电流调节器的可行性。
图14 清晰反映了MTPA 和SCR 控制策略下电压工作点的轨迹,电机在恒转矩区时,电压工作点在MTPA 曲线上(如图中箭头1所示),电机进入弱磁区后,电压工作点沿最大电压圆移动(如图中箭头2所示)。
为进一步验证控制策略,搭建实验台架进行实验验证。实验台架由永磁同步电机、控制器、直流稳压电源、上位机、示波器和电流钳组成,其中上位机用于发送转速指令,并每隔0.02 s 接收记录一次控制器上传的各项数据。控制器中的控制算法运行周期为100 μs,控制器在接收到上位机发送的转速指令后,转速指令以斜坡的形式每隔100 μs递增一次。示波器和电流钳用于实时观测电机相电流。
4.1 深度弱磁实验
利用实验台架进行深度弱磁实验,电源电压仍为50 V。实验中由于电源输出能力限制(20 A),电机稳定运行的最高转速为2 800 r/min,此时电压相角β约为2.08 rad,电机已经实现了3 倍弱磁控制,而单电流调节器的稳定运行范围是3.14 rad,若电源柜输出能力足够,电机仍有较大的升速空间,因此系统还具有更强的深度弱磁能力。上位机记录的电机转速speed、电压相角β和交直轴电流id、iq如图15所示。直轴电流id的指令跟踪情况和交直轴电压指令ud、uq如图16所示,电机在2 800 r/min时示波器记录的电机相电流如图17 所示,电流轨迹如图18 所示,电压轨迹如图19所示。
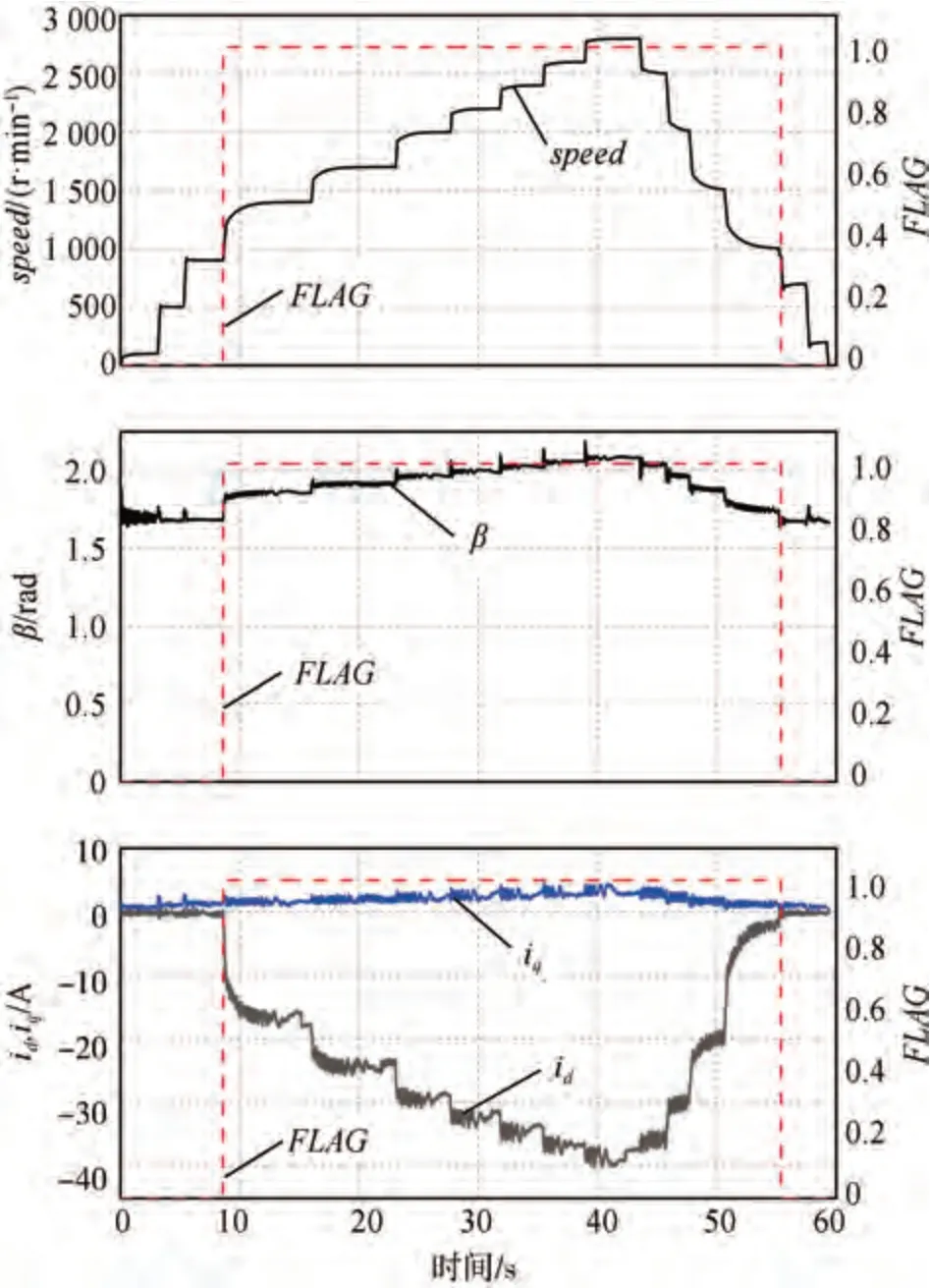
图15 转速、电压相角和电流实验结果

图16 电流指令跟踪情况与电压指令

图17 转速2 800 r/min时的电机相电流
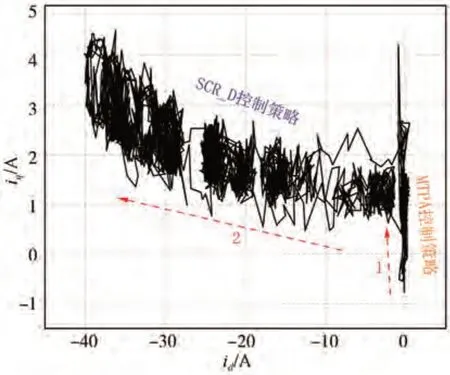
图18 电流轨迹图

图19 电压轨迹图
由图15 可知,电机转速由0 逐渐上升到2 800 r/min,然后再逐渐减速到0。在8.5 s时电机转速达到950 r/min,弱磁标志位FLAG 由0置1,电机由恒转矩区进入恒功率区运行。大约在39 s时电机转速稳定运行在2 800 r/min,实现3 倍深度弱磁控制,此时电源柜显示直流母线电流为18.6 A,接近电源最大输出能力。由图17 可知,此时示波器记录的电机相电流有效值为28 A,且电流波形稳定。随着电机转速升高,电机在进入弱磁区后,在d轴单电流调节器SCR_D 的调节下,电压相角β不断增大,电机转速稳定后,电压相角稳定在2.08 rad 附近,随后电机开始减速,电压相角β便逐渐减小。
由图15 可知,在电机转速上升过程中,电机由恒转矩区进入恒功率区,交轴电流iq先增后减,直轴电流id在负向逐渐增大,当电机转速逐渐减小时,电机由恒功率区进入恒转矩区,交轴电流iq先增后减,直轴电流id在负向逐渐减小。在弱磁标志位FLAG由0 变1 和由1 变0 的瞬间,即控制策略由MTPA 切换到SCR_D 和SCR_D 切换到MTPA 的瞬间,电机转速、电压相角和电流都实现了平滑切换,没有出现电流尖峰和转速波动。
由图16 可知:在电机转速上升时,直轴电流id稳定跟踪指令i*d,并沿负向增大,交轴电压指令uq在恒转矩区逐渐增大,在弱磁区逐渐减小,直轴电压指令ud则沿负向一直增大,且在控制策略切换时各指令平稳过渡,电流也稳定跟随;
在电机转速下降时,并沿负向减小,交轴电压指令uq在弱磁区逐渐增大,恒转矩区逐渐减小,直轴电压指令ud则沿负向一直减小,且在控制策略切换时各指令平稳过渡,电流也稳定跟随。
图18为电机转速由0到2 800 r/min,再到0的电流轨迹图。在此过程中,电流工作点在MTPA 策略控制下沿MTPA曲线向上(如图中箭头1所示),转速到达基速后,电流工作点在SCR_D 策略控制下沿电流圆与电压椭圆交点移动(如图中箭头2 所示),电机降速时,电流工作点沿上述路线返回0点。
图19 也清晰反映了MTPA 和SCR_D 控制策略下电压工作点的轨迹,即电压工作点先沿MTPA 曲线(如图中箭头1 所示),后沿最大电压圆(如图中箭头2所示),电机降速后,电压工作点沿原路径返回。
4.2 电动发电切换实验
利用实验台架进行电动发电切换实验,即d轴单电流调节器SCR_D 和q轴单电流调节器SCR_Q切换实验。为验证SCR_Q 控制策略以及SCR_D 和SCR_Q 的切换策略,本文的发电实验只采用了SCR_Q 电流环,未使用电压环进行控压。实验中直流母线电压仍为50 V,首先将电机转速由0 上升到1 200 r/min,1 200 r/min 时电机工作于弱磁区,采用SCR_D控制,此时通过上位机发送发电信号,使电机切换到发电工况,基速以上采用SCR_Q 控制,基速以下采用MTPA 控制,直至电机转速降为0。为保证直流电源柜的供电安全,系统接收到发电信号时,限制发电电流is=-2 A,以防止电源柜出现过压故障。实验过程中,上位机每隔0.1 s记录一次控制器上传的数据,电机转速和控制器电压随发电信号的变化情况如图20 所示,交直轴电流id、iq的跟踪情况如图21所示,交直轴电压指令ud、uq随发电信号的变化情况如图22 所示,电流轨迹如图23 所示,电动发电切换瞬间示波器记录到的电机相电流如图24 所示,电动发电切换瞬间,未采取切换策略的电机相电流如图25所示。
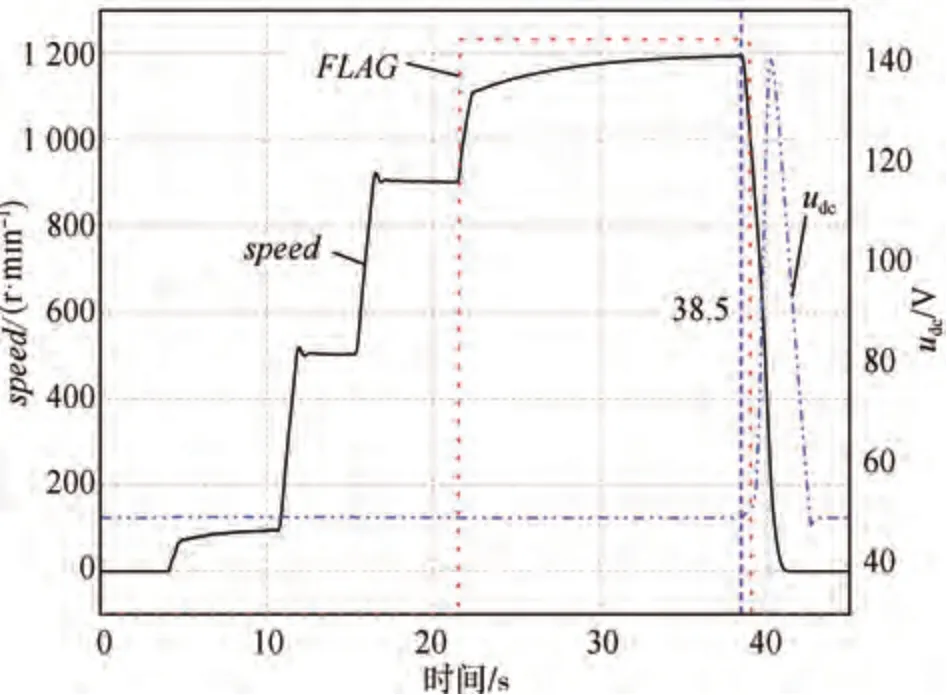
图20 电机转速和控制器电压随发电信号的变化情况

图21 交直轴电流跟踪情况

图22 交直轴电压指令随发电信号的变化情况
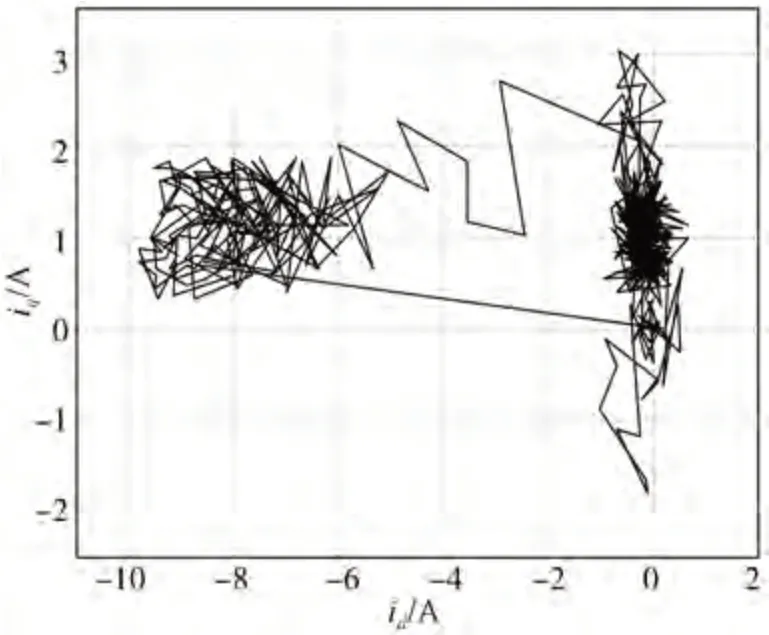
图23 电流轨迹图

图24 电动发电切换时的电机相电流

图25 未采取切换策略时的电机相电流
由图20 可知,电机转速在MTPA 和SCR_D 的控制下由0 上升到1 200 r/min,在21.6 s时弱磁标志位FLAG 由0 置1,完成了MTPA 控制策略到SCR_D 控制策略的切换。在38.5 s 时系统接收到发电信号,系统控制策略由SCR_D 切换到SCR_Q,电机进入发电工况,控制器电压因发电由50 V 开始升高,直至140 V,电机转速则开始下降,在39.1 s 时转速下降到基速以下,弱磁标志位FLAG由1置0,系统控制策略又由SCR_Q 切换到MTPA。在此过程中,系统控制策略完成了如下切换过程:MTPA—SCR_D—SCR_Q—MTPA,且切换瞬间电机转速无波动。
由图21 可知,在21.6 s 以前(FLAG=0 时),电机运行在电动状态,处于MTPA 控制阶段,交直轴电流id、iq都稳定跟随电流指令;
在21.6~38.5 s 期间(FLAG=1),电机进入弱磁区,仍运行于电动状态,处于SCR_D 控制阶段,此时系统只控制直轴电流id,只产生直轴电流指令,且直轴电流id稳定跟随直轴电流指令,而交轴电流iq不再受控,因此不再产生交轴电流指令;
在38.5~39.1 s 期间(FLAG=1),系统接收到发电指令后,电机仍在弱磁区,运行于发电状态,处于SCR_Q 控制阶段,此时系统只控制交轴电流iq,只产生交轴电流指令,由于限制了发电电流is=-2 A,则交轴电流指令≈-2 A,鉴于此阶段时间短且交轴电流iq无法阶跃变化,交轴电流iq开始向交轴电流指令趋近,而直轴电流id不再受控,因此不再产生直轴电流指令;
在39.1 s后(FLAG=0),电机仍运行在发电状态,处于MTPA 控制阶段,产生交直轴电流指令,且交直轴电流id、iq都稳定跟随电流指令。同时由图可知,在电动发电切换瞬间,交直轴电流id、iq实现了平滑切换,没有出现电流波动。
由图22 可知,在21.6 s 以前(FLAG=0 时),系统处于MTPA 控制阶段,随着电机转速升高,交直轴电压指令ud、uq的幅值增大;
在21.6~38.5 s 期间(FLAG=1),系统处于SCR_D 控制阶段,通过调节电压相角β来重新分配逆变器最大输出电压umax,进而获得交直轴电压指令ud、uq;
在38.5 s 时接收发电指令,进行电动切换发电变换,通过切换控制策略,交轴电压指令uq在切换瞬间基本保持不变,且没有出现交直轴电压指令ud、uq的波动,验证了切换策略的有效性。
图23 展示了全过程中,电流工作点在控制策略和切换策略作用下,沿MTPA—SCR_D—SCR_Q—MTPA的变化路线。
由图24 可知,采用切换控制策略后,切换瞬间,电机相电流实现了平滑过渡,没有出现电流尖峰。作为对比,图25 为未采用切换控制策略时的电机相电流,可以看到切换瞬间电机相电流有很大的尖峰,极易使系统出现过流故障。
仿真与实验结果表明:(1)基于电压相角的单电流调节器深度弱磁控制方法在弱磁区依托逆变器最大输出电压umax,通过一个电流调节器调节电压相角β来重新分配交直轴电压指令ud、uq,使控制结构得以简化,抑制了交直轴交叉耦合,充分利用了逆变器最大输出电压umax,提高了电压利用率;
同时,通过交直轴电流id、iq调节电压相角β获得交直轴电压指令ud、uq的方式,使控制方法获取指令时不依赖电机参数,获取电压指令时无须通过查表获得,提高了控制方法的可移植性;
(2)在模式切换控制策略作用下,实现了弱磁区与恒转矩区、弱磁区电动工况与发电工况的平滑切换,使电机转速、电流和电压指令在切换瞬间无波动。
针对永磁同步电机传统双电流调节器在高速时交叉耦合严重,电流调节器易于饱和,难以进行稳定深度弱磁的不足,提出基于电压相角的改进型单电流调节器深度弱磁控制策略及模式切换控制策略。相对已有的单电流调节器弱磁控制策略,该方法具有动态性能优异、控制结构简单、不依赖电机参数、电压利用率高和可移植性强等优点。分析了SCR_D和SCR_Q 的稳定运行范围和适宜工况,分别提出对应的弱磁控制策略。针对现有恒转矩区和弱磁区切换方法存在的不足,本文中改进优化切换方法,使其适用于各类电流工作点,切换时保持电压相角β不变,从而实现恒转矩区与弱磁区平滑切换。针对SCR_D 和SCR_Q 只适用于电动工况或发电工况的不足,提出以提升弱磁区输出功率为目标的等功率控制模式切换策略,关键之处在于切换瞬间保持交轴电压uq不变,实现SCR_D 和SCR_Q 间的平滑切换。最后,仿真和实验验证了单电流调节器控制策略稳定的深度弱磁能力,实现了6.3 倍深度弱磁,验证了恒转矩区与弱磁区、不同单电流调节器之间模式切换策略的有效性。
猜你喜欢相角调节器指令ARINC661显控指令快速验证方法测控技术(2018年5期)2018-12-09配电网30°相角差线路不停电转供方案探究电子制作(2018年1期)2018-04-04杀毒软件中指令虚拟机的脆弱性分析电信科学(2016年10期)2016-11-23基于DFT的同步相量相角测量改进算法研究电气开关(2016年6期)2016-08-11基于相角差的绝缘子表面污秽受潮检测系统设计与仿真西安工程大学学报(2016年2期)2016-06-05小电流接地故障初相角模拟试验控制系统的设计电测与仪表(2016年6期)2016-04-11基于Superbuck拓扑的高效蓄电池充电调节器研究电源技术(2015年9期)2015-06-05一种新颖的单PI调节器消除双向有源桥无功功率的方法电测与仪表(2015年20期)2015-04-09基于抗积分饱和速度调节器的TSMC-PMSM矢量控制电测与仪表(2015年3期)2015-04-09中断与跳转操作对指令串的影响科技传播(2015年20期)2015-03-25 相关热词搜索:永磁,控制,调节器,





