基于激光条带追踪的桥梁振动非接触测量方法
时间:2023-03-10 12:00:03 来源:千叶帆 本文已影响人
唐 亮,吴 桐*,杜 鹏,刘 年,周志祥,戚小磊
(1.重庆交通大学 土木工程学院,重庆 400074;
2.深圳大学 土木与交通工程学院,广东 深圳 518060;
3.中铁二十二局集团第五工程有限公司,重庆 400711)
桥梁在运营过程中会受到如车辆、风和地震等来自外界的各种荷载作用。结构健康监测(structural health monitoring,SHM)是通过对桥梁整体或局部构件的性能进行监测、评估和反馈,及时发现结构存在的安全隐患,并采取相应的维修加固处理,保证桥梁安全运营的根本举措。其中,在荷载作用下反映结构刚度的位移响应是SHM系统关注的重要参数[1–3]。通过对结构位移信号的测量并进行模态分析,可以得到结构的自振频率、振型、阻尼比等动力特性参数。
传统的结构静/动力位移测量有两种方法:1)在结构表面安装百分表、LVDT等接触式位移传感器,这种方法测量结果准确,但是需要在桥下搭设支架以获得相对结构不动点,且需要布线为数据传输与仪器供电,实际操作较繁琐。2)利用全站仪、水准仪观测结构变形,但该方法只能获得结构的静力位移,无法测量在荷载作用下结构的实时位移响应[4–6]。为了克服接触式传感器的不足,研究人员对包括全球定位系统(GPS)[7–9]、激光多普勒测振仪(LDS)[10–11]、雷达干涉测量[12]和基于计算机视觉的非接触测量方法进行研究。其中,基于计算机视觉的位移测量方法以其大尺度测量和适用范围广等优势在工业领域得到了较广泛的应用。
基于计算机视觉的位移测量方法根据目标类型可以分为点跟踪(PT)、数字图像相关方法(DIC)或无目标跟踪方法[13]。点跟踪是在结构上安装一系列光学目标(通常是高对比度圆形点或回复反射目标),采用椭圆定位算法跟踪光学目标的中心,测量目标中心的位置改变。Morlier等[14]利用2D点跟踪进行桥梁动位移响应测量,并进一步处理以提取固有频率。Busca等[15]在点跟踪方法中使用了方形光学目标跟踪其角点,测量桥上多点的动位移。Wu等[16]引入新的校准方法,提高摄影测量的精度,并对位于振动台上的结构进行2维测量,用点跟踪法测得结构响应的FFT谱图显示结构的前几阶频率。楚玺等[17]将欧拉运动放大算法应用于桥梁振动分析,通过对振动放大后的数字影像进行帧数分解,获得常规视频采样频率下的桥梁试件振动时间历程序列;
最后,通过分析图像序列中标记点的边缘特征,得到试验桥梁标记点的动态位移测量结果。Dong等[18]提出通过追踪光学目标的多点同步测量结构动态位移的方法,利用实测多点动位移和FFT识别结构模态参数。Feng等[19]利用改进的模板匹配算法,通过追踪标志点实时测量一座铁路桥梁的动位移,并识别其频率。
DIC基于追踪连续图案的灰度变化,对变形前图像中的感兴趣区域(ROI)进行网格划分,将每个子区域当作刚性运动;
再针对每个子区域,通过一定的搜索方法按预先定义的相关函数进行相关计算,在变形后图像中寻找与该子区域的互相关系数为最大值的区域,即该子区域变形后的位置,进而获得该子区域的位移;
以此对全部子区域进行计算,即可获得全场的变形信息。由于早期的DIC系统需要较大的变形值来识别响应,因此,早期与模态识别相关的研究大多集中在单一模态激励上。Warren等[20]利用振动台以共振频率激励结构,利用DIC系统测量激励过程中结构的变形形状,进而识别结构的模态。Wang等[21]利用2维DIC系统,测量复合材料板的振动模态,并与有限元模型进行比较。Tregidgo等[22]使用DIC测量飞机机翼在不同工况下的变形,并使用DIC测量机翼的响应。在这种情况下,振动的振幅通常小于谐波激励,模态提取较为困难。另外,许多DIC软件程序不具备对频域数据的信号处理功能,且由于DIC中的数据是点云的形式,商业模态分析软件程序无法进行数据处理。因此,研究人员使用定制的脚本对数据进行后处理以提取模态形状。Molina−Viedma等[23]利用DIC与运动放大算法,实现对结构微小振动的测量;
随后,Molina−Viedma等[24–25]利用高速3维DIC系统和局部频域滤波算法,实现框架结构和悬臂梁的振动测量与损伤识别。Beberniss等[26]利用白噪声激励刚度较小的金属结构;
为了提取振型,其利用多项式对DIC数据进行曲线拟合,并用这些多项式更新有限元模型。Hagara[27]和Trebuňa[28]等使用白噪声激励金属薄板,使用DIC测量结构的响应,并开发了一个能够从DIC中直接提取模型模态参数的软件程序。
无目标方法是通过跟踪结构内部特征或边缘等自然特征来识别并跟踪目标对象[29]。Busca等[30]利用模板匹配、边缘检测和DIC 3种模板匹配算法,开发了一种基于视觉的位移传感器系统。利用视觉传感器跟踪固定在桥梁上的高对比度目标板,测量桥梁的竖向位移。Ribeiro等[31]利用随机抽样一致性算法(RANSAC),测量铁路桥梁的动态位移;
基于鲁棒方向码匹配算法,通过跟踪结构表面的自然目标,开发一种用于实时位移测量的视觉传感器系统,避免了人工靠近结构物安装标靶。郑佳艳等[32]将欧拉运动放大算法与边缘检测算法相结合,测量了实验室一座自锚式悬索桥缩尺模型的动位移。Son等[33]提出一种摄像机对振动位移进行远程测量的边缘检测算法,并利用所提出的测量方法对圆柱结构振动位移的测量分辨率和测量误差进行估计。Yoon等[34]通过无人机搭载摄像机追踪结构上自然特征点,测量在荷载作用下铁路桁架桥的位移响应。Dong等[35]提出针对不同结构设置不同的虚拟标记点,利用光流追踪算法识别在人群跳跃工况下体育场的模态参数。
然而,基于目标跟踪的方法通常需要人工靠近结构表面喷涂散斑或粘贴标识点等方式,以获得可跟踪的外部目标,在实际桥梁的布置上会花费大量时间,可测量的位移点数与标志点的数量有关。应用边缘检测、自然特征点跟踪及运动放大算法可实现无目标跟踪,但对光照和背景条件又有较高的要求;
如果在测量过程中光照条件不理想或发生改变,该方法效果差强人意。
针对以上存在的不足,本文提出一种通过在桥梁结构表面投射激光条带,追踪光带中心,测量桥梁位移并识别结构模态参数的方法。具体做法为:通过大功率线激光器投射激光线至桥梁底面或顶面,倾斜拍摄激光线连续影像;
利用改进灰度重心法亚像素追踪拟合激光条带中心线位置在图像上的改变,几何换算得到桥梁振动位移时程曲线,进而分析获得桥梁结构的动力参数。激光线的远距离投射不需要靠近桥梁结构表面,且不依赖于环境光照和背景条件,可实现性好。在室内试验条件下,对简支梁模型桥进行锤击强迫振动试验,以SONY 4K摄像机作为影像采集设备,LVDT位移传感器和加速度传感器作为传统数据采集设备,进行同步数据采集试验,测量动位移响应,识别模型桥模态参数,并将测量结果与传统传感器进行对比。
基于激光条带追踪的结构振动测量大致分为视频采集、图像预处理、激光条带中心提取、像素点位移计算和真实位移计算5个步骤,其流程图如图1所示,测量原理如图2所示。由图2(a)可见:线激光器在结构物正上方竖直向下投射,在结构表面形成一具有一定宽度的激光条带;
当结构发生竖向振动时,激光条带会伴随结构一起振动;
将摄像机倾斜拍摄,则激光条带的竖向振动在图像平面表现为斜向振动,其在结构表面的横向位置也会发生改变。图2(b)为图2(a)的侧视图,假设A为投射在物体表面的激光线上一点,A"为图像中与A对应的点。当结构发生变形时,点A运动到点B,在图像平面表现为A"运动到B"。图像预处理包括图像裁剪、图像滤波和图像灰度化。采用灰度重心法提取激光条带中心线,将提取的中心线在时间尺度上进行串联,即可得到激光线各列像素中心点的像素位移时程曲线;
再根据图像平面与真实物理平面的尺度转化因子,就能够计算得到结构表面激光条带中心线的真实位移时程曲线,也就是结构的位移时程曲线。

图1 基于激光条带中心追踪的结构振动测量流程图Fig.1 Overall flowchart of vibration measurement method based on laser stripe tracking

图2 基于激光条带追踪的结构振动测量原理图Fig.2 Principle diagram of structural vibration measurement based on laser strip tracking
1.1 真实变形与成像变化的理论关系
数字立体摄影测量是一种非接触测量方法,利用相机记录的一系列图像识别点、图案、图像中的特征或物体边界的坐标[29]。在测试期间,将相对位置固定在适当位置,同时记录图像(或视频)并保存。在图像中找到光学目标或特征,并跟踪以识别变形。
由图2(b)可见,假设相机针孔与物体表面距离为D,相机焦距为f,相机光轴与物体表面法线夹角为θ,dpixel为图像中单位像素对应的尺寸,若AB长度已知,A点与B点的真实坐标分别为zA和zB,在图像平面对应点A"和B"的像素坐标分别为IA"和IB",则比例因子的计算公式为:

当倾斜角度 θ=0时,式(1)可简化为:

当倾斜角度 θ ≠0时,根据相似三角形原理,zA和zB可以表示为:

式中,ziA′和ziB′分 别为图像平面的尺寸坐标,ziA′=IA′dpixel,ziB′=IB′dpixel。当θ很 小(即 s in θ ≈0 ),且 有ziA′≪f和ziB′≪f时,式(3)中的比例因子可以根据相机的内在参数和相机与结构之间的外在参数进一步简化:

以Sony FDR AX–700摄像机为例,设图像分辨率为1 920×1 080,传感器高为8.8 mm,当 θ=0时,根据式(2)计算在不同焦距工况下比例因子SF随着摄像机与物体距离变化的关系如图3所示;
当 θ ≠0,根据式(4)计算摄像机与物体距离为2.0 m时,不同焦距工况下比例因子随倾斜角度的变化关系如图4所示。

图3 不同焦距下比例因子与测量距离关系Fig.3 Relationship between SF and measurement distance under different focal lengths

图4 不同焦距下比例因子与倾斜角度关系Fig.4 Relationship between SF and tilt angle under different focal lengths
由图3可见:当焦距不变时,SF随测距增加线性增加;
当测距不变时,SF随焦距增加而增加。由图4可见:随着倾斜角度的增大,比例因子SF表现为指数增长;
但当 θ<30◦时,SF增大不明显,可以大致认为相邻两点的比例因子不变。所以,根据式(2)和(4),当结构发生变形时,其真实变形值可以根据图像中的变形值×比例因子SF1或SF2计算得到[19]。并且,实际变形值与图像中的变形值呈线性关系,即通过数字图像上点的位置变化可线性计算得到被测物表面点的变形值。因此,由图像上激光线的模态信息获知结构的模态信息是可行的。
1.2 图像预处理
由于图像中包含了大量的背景及其他光噪声,为了提高光条中心定位的精度,首先需要对图像进行预处理,步骤如下:
1)对图像感兴趣区域(ROI)进行裁剪。根据结构振动的先验知识可知,对于大部分桥梁而言,其振动幅度微小,且多为竖向振动,则激光条带中心位置的变化幅度范围较小,且仅在竖向发生变位。由于激光条带在图像长度方向所占尺寸远大于宽度方向尺寸,所以可以将图像裁剪长度设为激光条带全长,宽度为其宽度的5~10倍。
2)采用中值滤波对图像进行降噪处理,其基本原理是把数字图像或数字序列中一点的值用该点的一个邻域中各点值的中值代替,让周围的像素值接近真实值,从而消除孤立的噪声点。
3)对图像进行灰度变化。一张RGB图像是一个M×N×3的彩色像素数组,用矩阵可以表示为:

对图像进行灰度转换是将3通道的彩色图像转换成2通道的灰度图像。通过灰度转换可以使图像中灰度值较大的区域变亮,灰度值较小的区域变暗,从而突出激光条带的灰度值比例,有助于进行下一步的计算和中心线的提取。目前常用的图像灰度处理方法主要包括平均值法、单一灰度法和加权平均值法。其中:平均值法是将3通道灰度的平均值作为转换后的灰度值;
单一灰度法是仅保留3个通道中某一特定通道的灰度值;
加权平均值法是将R、G、B3分量以不同的权重进行加权平均,目前公认权重取值分别为0.299、0.587和0.114,则加权平均法的公式为:式中,R、G、B分别为彩色图像中3通道的灰度值,g"为处理后的灰度。

利用3种方法分别对试验的图像进行灰度化,如图5所示。从图5可以看出,由于激光线为红色,当仅保留R分量时,激光线与背景的对比度最高,便于后续计算。因此,在后续图像灰度化均采用R通道单一灰度值法。

图5 不同灰度转换法得到的灰度图像Fig.5 Gray images obtained by different gray conversion methods
1.3 基于改进灰度重心法提取激光条带中心坐标
线激光器发出的光束投射到结构物表面时,形成一条一定宽度的光条,该光条中心线位置附近光强高,两侧边缘光强低。要想高精度追踪激光线的改变,需要高精度定位各时刻光条中心线位置。具体方法有基于光条灰度极大值附近区域灰度拟合曲线的极大值位置法(包括灰度极值法、抛物线拟合法和基于Hessian矩阵的Steger法)和基于光条区域灰度拟合曲线的灰度重心法(包括自适应阈值重心法、自适应重心迭代法、多项式拟合法、NURBS曲线插值法和方向模板法等)两大类[36],本文采用改进的灰度重心法提取激光条带中心坐标。
令g(x,y)表示经过预处理后的一幅灰度图像不同像素点的灰度值,对于一幅像素为M×N的图像,有:

传统灰度重心法是逐一计算激光条带各列的灰度重心,将每一列计算得到的激光条带灰度重心的纵坐标作为中心坐标。假设第k列的纵坐标分别为yi(i=0,1,2,···,M), 对应灰度值分别为g(ii=0,1,2,···,M),则该列的灰度重心计算公式为:

采用传统灰度重心法提取激光条带中心线,将各列像素的灰度重心点沿长度直接连线。在实际操作过程中,由于激光线沿长度方向的截面宽度与亮度分布不均匀,使该方法极易受到噪声影响,且参与计算的像素点数量会发生改变。因此,为了提高提取激光条带中心线的精度,可通过设置动态灰度阈值Ti(i=0,1,2,···,N),对图像进行自适应灰度矩阵重置,重新确定各列参与计算的光条像素点数量及边界像素:

式中,g(x,y)为原始图像的灰度矩阵。
激光条带截面光强分布近似于高斯分布[37]:

式中:y为图像平面上2维笛卡尔坐标系的y坐标;
A为激光条带灰度值;
为强度分布中心的y坐标,即高斯曲线的中心坐标;
σ为激光条带强度分布的宽度。当y=时,I(y)达到最大值。
因普通线结构光激光器的光强沿激光条带的纵向近似表现为高斯分布,即中间部分亮度大,两端亮度较低,则动态阈值的数学模型可以表示为:

式中,X、b、c均为常数,且X>0。可以先计算部分离散阈值T,根据高斯拟合确定参数X、b、c,从而计算各列的阈值Ti。
按照等间距选取y列像素,计算离散阈值T:首先,利用极值法得到光带中心的大致位置,设第i列激光宽度为s,在中心位置上下各取宽度s的像素点,使区域宽度为激光条带宽度的两倍,保证光带横向全部在该区域内;
同时,再向左右分别扩展s列,可得到s×2s大小的矩形区域,利用最大类间方差法计算每一列的阈值T;
再根据式(11)进行高斯拟合,得到阈值函数T(x),确定各列像素的阈值,并确定各列参与计算的光条像素点数量及边界像素;
然后,按照式(8)逐列计算光条的中心坐标。各列计算完毕,则可以得到光条的中心线提取结果。
2.1 试验概况
试验所用简支铝梁跨径为3.84 m;
横截面为π形截面,顶板宽15 cm,厚3 mm;
肋板高5 cm,厚3 mm;
肋板间距为5 cm。材料弹性模量为7.2×104MPa, 密度为2.73 g/cm3。采用索尼4K摄像机(FDR–AX700)追踪激光线位置的改变。摄像机拍摄视频为1 920×1 080像素、帧率为100 fps。同时,在简支梁跨中布置1个LVDT位移传感器,在梁下方等间距布置7个加速度传感器,采样频率均设置为200 Hz;
配合江苏东华测试公司的动态采集仪DH 5902N采集位移响应作为验证。简支梁模型与试验布置如图6所示。

图6 简支梁试验现场照片Fig.6 Photos of the simply supported beam test
俯视角度约30°时,分别进行拍摄距离为0.5和2.0 m自然光照下和2.0 m完全黑暗环境下共3种工况的锤击振动试验。试验过程中:用支架固定摄像机,调整好摄像机的倾斜角度之后,利用分辨率为0.01°的数字倾角仪测量摄像机倾角并记录;
保持摄像机空间位置与角度不变,为防止手动拍摄带来的扰动,采用蓝牙遥控器控制拍摄。单次试验采用锤击法在模型梁跨径5/16处进行多次锤击激励,利用结构受迫振动后的自由衰减信号进行振动分析。
2.2 光强分布与中心线定位
将所录制的视频逐帧转换为灰度图像(图7)。激光线在简支梁上的投影为一灰度值明显大于其他区域的激光条带。选取第800列的激光条带分析截面光强,该截面光强分布如图8所示,利用高斯分布进行拟合,其相关系数为R=0.947 2。采用低通和中值滤波及图像分割后,得到激光条带,作为光条中心计算的基础。然后,对序列图像依次利用改进灰度重心法计算每列中的光强峰值点,可以得到各列光条的中心位置坐标(图9)。令hx(y,t)为第x列中光强中心随时间的变化,可得到其振动时程曲线。

图7 激光线图像及灰度图像Fig.7 Laser line image and its gray image

图8 截面光强分布(x=800)Fig.8 Light intensity distribution (x=800)
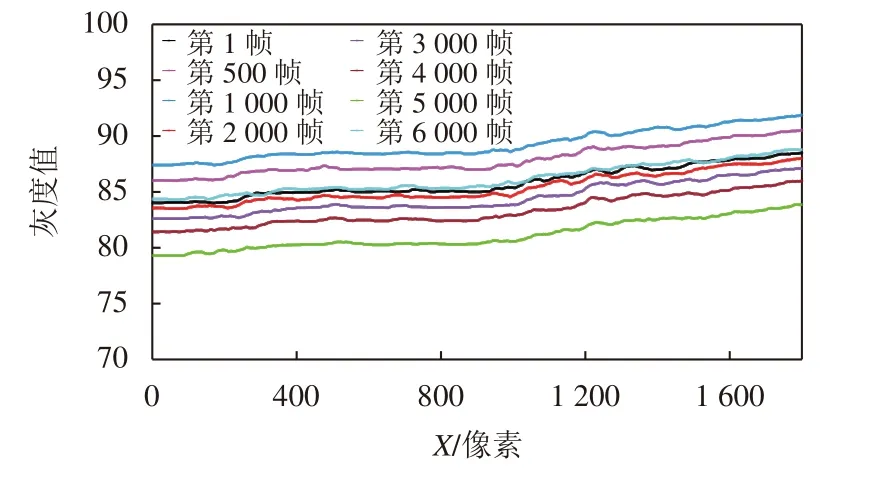
图9 激光条带中心提取Fig.9 Extraction of laser stripe center
2.3 动位移实测结果与模态分析
将激光线中与LVDT位移传感器对应点的振动时程曲线与比例因子相乘,可得到该点位移时程曲线。将3种工况摄像机和LVDT的采集起点统一,各工况位移时程曲线如图10所示。由图10可以看出,由摄像机测量得到结构位移的总体趋势与位移传感器测量结果基本一致,正确反映了桥梁的振动幅值、振动衰减特性、起振点等信息。各次激振摄像机测量得到的位移与位移传感器结果吻合较好。

图10 各工况跨中测点位移时程曲线Fig.10 Displacement time history curves of mid-span in each case
为了从整体上评估摄像机测量动位移的精度,对位移传感器测量数据进行重采样,与摄像机采样频率保持一致为100 Hz。使用归一化均方根误差( δNRMS)进行误差分析,计算公式为:

式中,n为测量数据的总数,xi和yi分别为由位移传感器和摄像机测量得到的第i个位移值,ymax和ymin分别为摄像机测量得到的最大位移值和最小位移值。各工况不同方法测得的位移值见表1。由表1可见:3种工况的 δNRMS分别为2.49%、2.58%和1.80%;
通过分析各次锤击后的位移数据,可以得到工况1测量最大误差为1.82%,工况2最大误差为3.17%,工况3最大误差为2.49%;
结构的绝对位移越大,其相对误差越小;
在相同测距的情况下,黑暗环境的测量精度高于自然光条件。由此说明,利用本文算法进行动位移测量的精度较高,其结果与实测值吻合良好,满足工程精度要求。
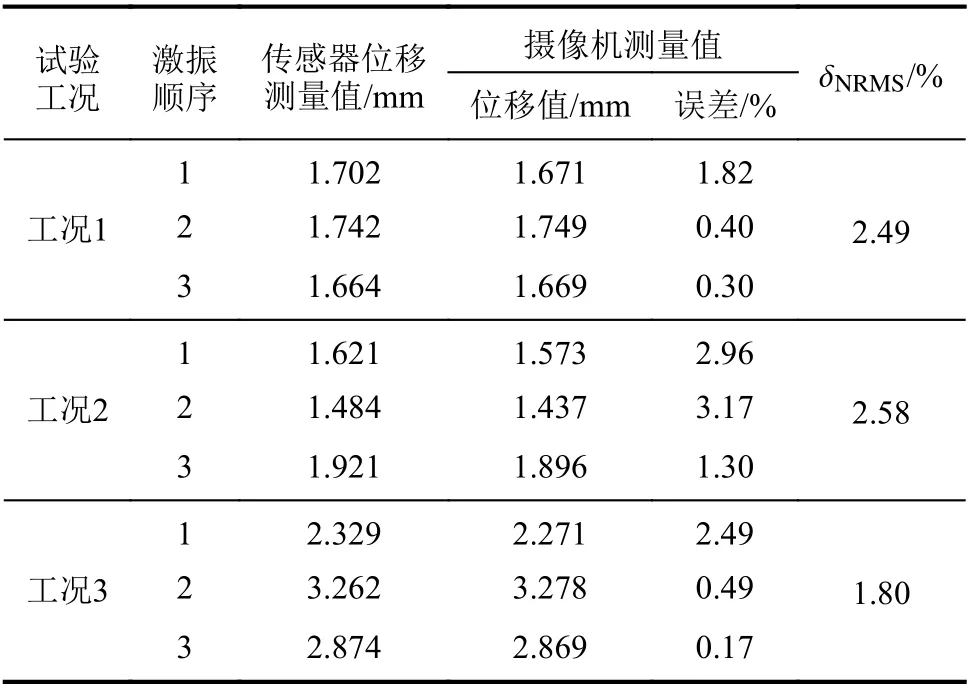
表1 各工况位移测量值Tab.1 Displacement measurements of each working condition
对所提取的振动时程曲线进行模态分析,得到试验梁在各工况的自振频率,如图11所示。由图11可以看出,幅–频曲线中主峰峰值明显突出,且各工况的峰值频率表现出高度的一致性。
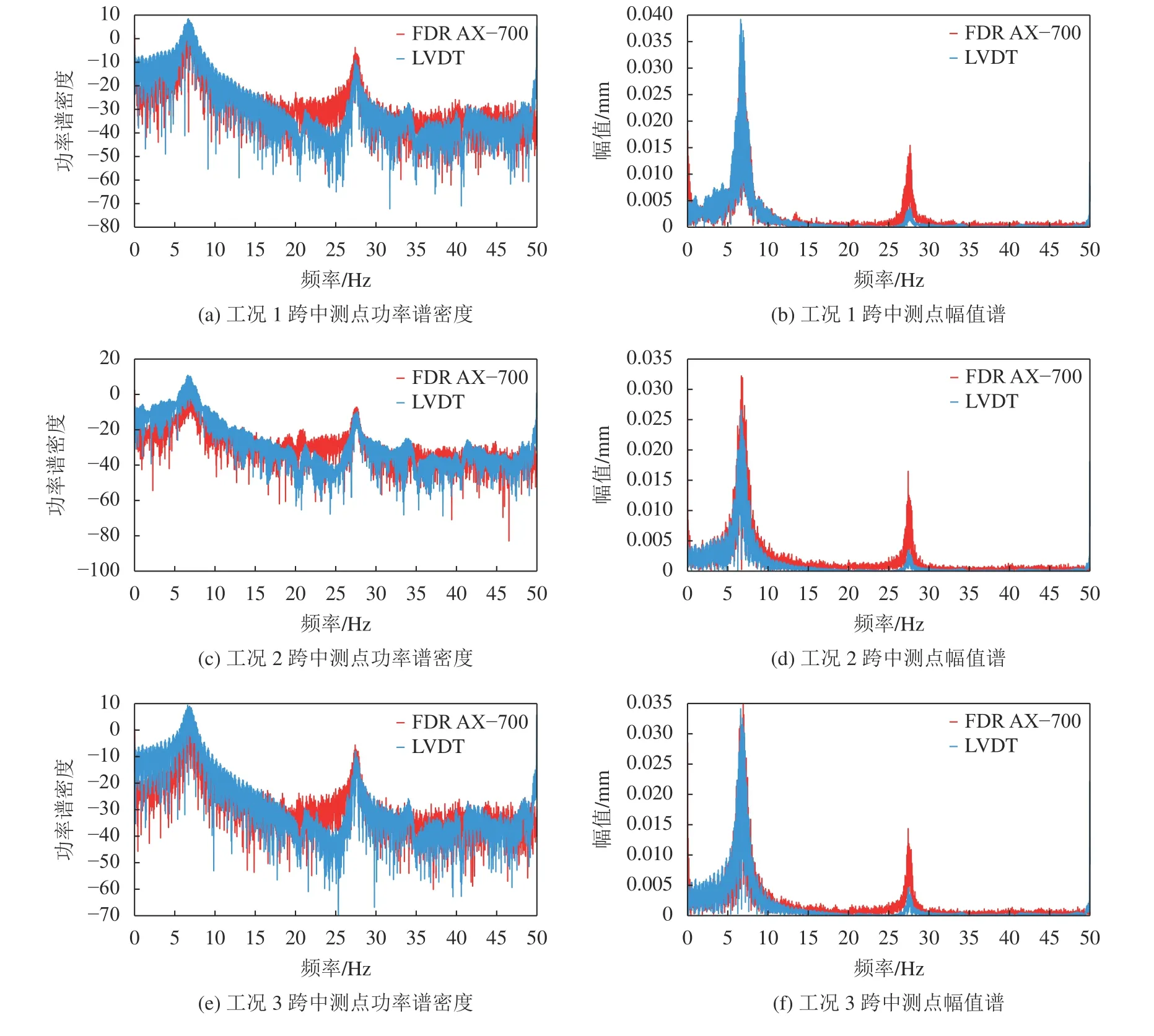
图11 各工况跨中测点的功率谱密度和幅值谱曲线Fig.11 Power spectral density and amplitude spectrum of mid−span point in each case
将识别的峰值频率列入表2。表2中,3种工况下,摄像机识别出的1阶频率为6.832、6.902和6.908 Hz,2阶频率为27.520、27.660和27.664 Hz。将由位移传感器测试的数据所得结构自振频率作为参考值,可以看出:利用摄影机所得到两次试验3个工况第1阶自振频率的相对误差分别为1.81%、0.80%和0.71%;
第2阶自振频率的相对误差均为0.25%左右;
第3阶频率的识别效果不甚理想,因此并未列出。这与结构的刚度及摄像机的像素有关:由采样定理可知,由于摄像机采样频率fs为100 fps,最高分析频率为fa=fs/2=50 Hz;
而由加速度传感器所得数据及简支梁的频率计算公式可知,结构第3阶自振频率大于50 Hz。因此,用摄像机无法得到结构的第3阶频率,可通过高速摄像机替换。

表2 实测频率值及相对误差Tab.2 Frequency values and relative errors
通过对所有列进行模态分析,可以得到简支梁模型高密度的模态振型,图12为工况2由激光线和7个加速度传感器所得简支梁前两阶位移模态。
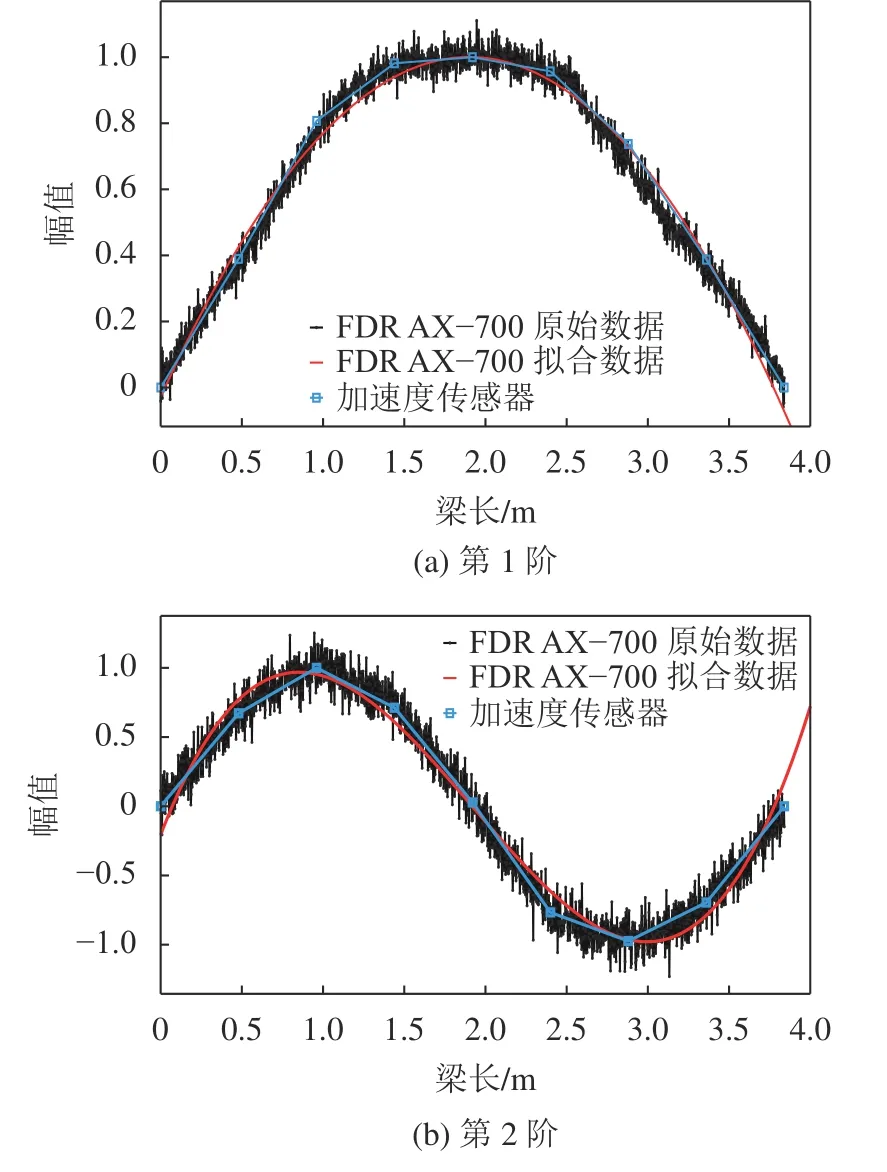
图12 工况2各阶模态振型Fig.12 Mode shapes of case 2
由图12可以看出:加速度传感所得振型的空间精度受限于传感器数量,而采用激光线所得振型空间精度可达到像素级;
对于小尺度结构而言,传统接触式传感器会改变结构的质量分布,进一步改变结构的刚度分布及模态参数。所提出方法无需在结构表面布置传感器,因此,对结构进行模态参数识别不会改变结构的质量分布。
利用激光条带中心追踪,进行桥梁振动测量与分析,得到如下结论:
1)图像上点的变形与被测结构上对应点的实际变形值有严格几何意义上的线性关系;
该线性关系与拍摄距离、角度及相机参数有关。通过数字图像上点的位置变化,可计算得到被测物表面点的变形值,由图像上激光线的模态信息获知结构的模态信息是可行的。
2)光带的横截面光强近似服从高斯分布,利用改进灰度重心法得到激光条带中心,实现了所拍摄影像的亚像素计算和分析,通过追踪连续影像条带中心位置改变,可得到其振动位移时程曲线。
3)摄像机测量所得动位移结果与LVDT位移传感器一致性良好,测量误差极值为3.17%,可满足工程测量精度的要求;
通过对振动位移时程曲线分析,得到结构振动低阶频率,前两阶频率相对误差极值为1.81%。通过模态分析得到了试验梁的前两阶像素级精度模态振型,与加速度传感器结果吻合良好,但受限于设备拍摄帧率与像素,无法分析获得结构更高阶模态,可通过采用高速摄像机改善。






